Download
1 / 6
70 likes | 208 Vues
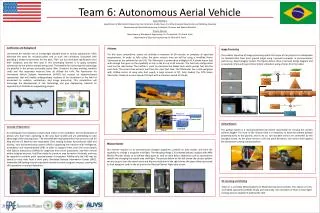
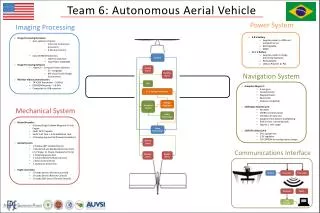
This project showcases an autonomous vehicle navigation system developed as part of the MECH 452 Mechatronics Engineering finals. The vehicle utilizes SHARP guidance technology for wall following, corner detection, and obstacle avoidance. It employs closed-loop systems for precise turning and adjusts speed based on environmental cues. The system integrates a camera for color recognition, distinguishing between traffic signals. This comprehensive approach emphasizes continuous awareness of surroundings, enhancing safety and reliability in autonomous navigation.

E N D
Group 6 and 9Autonomous Vehicle Navigation Demonstration MECH 452 – Mechatronics Engineering Project Finals - Stage 3 Monday, November 19, 2012
SHARP Guidance System • Wall Following using its side SHARP sensor • Encompasses PROPORTIONAL technology • Corner detection • Closed loop turning
SHARP Guidance System • SHARPs as infrared range sensors • SHARPs for wall following and cornering • Slows for parking, speeds up for bridge SIDE SHARPS
Colour Recognition • Camera looks for red and green lights • Green = turn, red = don’t turn, go straight CAMERA
Obstacle Avoidance • Front SHARP detects oncoming obstacles • Stops and even reverses away from obstacles FRONT SHARP
The Next Step In Mechatronics • Continuous obstacle avoidance • Awareness of surroundings • Safety and reliability • Closed loop