Serial Pattern Learning in Rodents Using a Rung Walking Apparatus
This study investigates implicit motor learning in rodents through a novel rung walking apparatus. It examines the effects of varying rung spacings on performance during a sequence learning task. Results indicate that while error rates decreased over time, significant differences arose among groups subjected to varying challenges. The findings highlight the potential of this apparatus for assessing implicit learning impairments, particularly in neurodegenerative disorders like Parkinson's disease.

Serial Pattern Learning in Rodents Using a Rung Walking Apparatus
E N D
Presentation Transcript
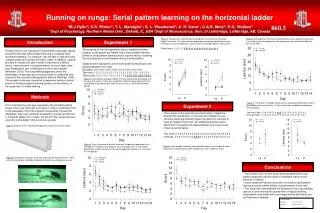
Running on rungs: Serial pattern learning on the horizontal ladder*M.JHylin1; S.S. Winter1; T. L. Marsiglio1; S. L. Weathered1; A. H. Kane1; G.A.S. Metz2; D.G. Wallace11Dept of Psychology, Northern Illinois Univ., DeKalb, IL, USA 2Dept of Neuroscience, Univ. of Lethbridge, Lethbridge, AB, Canada 860.5 Figure 7: Although over the course of testing there was a significant decrease in the time to cross the apparatus, the groups were not significantly different from each other. Figure 5: Group errors significantly increased when transferred to the probe pattern (left panel). Only the standard group demonstrated a significant increase in latency to cross the apparatus upon transfer to the probe pattern (right panel). Probe Pattern: 1 2 3 1 2 3 3 2 1 3 2 1 3 2 13 2 1 3 2 1 3 2 1 3 2 1 Experiment 1 Introduction The purpose of the first experiment was to establish whether subjects could acquire an implicit motor learning task that was similar to serial pattern learning and to test the effects of altering the rung spacing on performance during a probe pattern. Subjects were exposed to one of three patterns based upon the spacing between the rungs Standard: 11111111111111111111111111111111111111111 Two-level: 1 2 3 1 2 3 1 2 3 1 2 3 1 2 3 1 2 3 1 2 3 1 2 3 1 2 3 Three-level: 1 2 3 1 2 3 1 2 3 1 2 3 1 2 3 3 2 1 3 2 1 3 2 1 3 2 1 Rodents have a rich repertoire of sequentially organized, natural behaviors that may reflect implicit learning or relatively fixed movement patterns. For instance, rats are able to implicitly learn complex patterns (Fountain & Rowan, 1995). In addition, rodents are able to modify their gait in order to transverse a difficult terrain. Improvements in the performance of motor tasks have been attributed in part to alterations of the motor engram (Whishaw, 2000). The rung walking apparatus offers the advantage of exposing rats to varying levels of complexity with respect to the required walking pattern (Metz & Whishaw, 2002). The present study was conducted to determine whether factors known to influence implicit learning produce similar effects on the acquisition of skilled walking. Figure 3: Each group’s average number of errors significantly decreased over the course of testing. There was a significant effect of group such that the 3-Level group made significantly more errors than the 2-Level and Standard groups. Methods Figure 5: From day 14 to probe, there were no significant differences in either the number of errors or latency. Further, there were no differences between the two groups. Two-level Probe: 2 3 4 2 3 4 2 3 4 4 3 2 2 3 4 2 3 4 2 3 4 2 3 4 2 3 4 Interrupt Probe : 2 3 4 2 3 4 2 3 4 2 3 4 2 3 4 2 3 4 2 3 4 2 3 4 2 3 4 Experiment 2 Prior to all training, rats were exposed to the standard pattern (every other rung removed) for 5 days in order to acclimate them to the apparatus. Once the subjects successfully crossed the apparatus, they were randomly assigned to a group and trained in a specific pattern for 14 days. On the 20th day, all groups were given the same pattern that served as a probe. The purpose of the second experiment was to determine whether the introduction of a chunk that violated the rule structure would significantly impact the ability for subjects to learn an implicit motor task. An additional purpose was to determine if increasing the space between the rungs would influence performance. Two-level: 2 3 4 2 3 4 2 3 4 2 3 4 2 3 4 2 3 4 2 3 4 2 3 4 2 3 4 Interrupt: 2 3 4 2 3 4 2 3 4 4 3 2 2 3 4 2 3 4 2 3 4 2 3 4 2 3 4 Figure 1:Diagram of the rung walking apparatus used in the current study. Figure 4: Over the course of testing, there was a significant decrease in the average time it took for each group to cross the apparatus. The Standard group had a shorter latency in crossing the apparatus relative to 2-Level and 3-Level groups. Figure 6: Both groups showed a significant decrease in the number of errors across days. Groups did not differ significantly in the number of errors. Figure 2: Qualitative evaluation of correct and incorrect limb placement. When either the forelimb or hindlimb fell beneath the bar, it was scored as an error. Conclusions • The results of the current study demonstrate that the rung walking apparatus can be used to investigate implicit motor learning in rodents. • It was observed that factors known to influence serial pattern learning produce similar effects on performance in this task. • This study has demonstrated the potential for the rung walking task as a novel method for assessment of implicit learning impairments associated with neurodegenerative disorders such as Parkinson’s disease. Correct Limb Placement Correspondence: D. Wallace dwallace@niu.edu M. Hylin mhylin@niu.edu Web: www.niu.edu/user/tj0dgw1 Incorrect Limb Placement