Wireless Andros
Wireless Andros. ROSELYNE BARRETO FALL 2004 Imaging, Robotics, and Intelligent Systems Laboratory Department of Electrical and Computer Engineering, The University of Tennessee, Knoxville, TN. OUTLINE. Wireless Andros – Fall 2003 Objective Methodology Achievements

Wireless Andros
E N D
Presentation Transcript
Wireless Andros ROSELYNE BARRETO FALL 2004 Imaging, Robotics, and Intelligent Systems Laboratory Department of Electrical and Computer Engineering, The University of Tennessee, Knoxville, TN.
OUTLINE • Wireless Andros – Fall 2003 • Objective • Methodology • Achievements • Wireless Andros – Summer 2004 • Objective • Achievements • Wireless Andros – Fall 2004 • Conclusions • Future Work
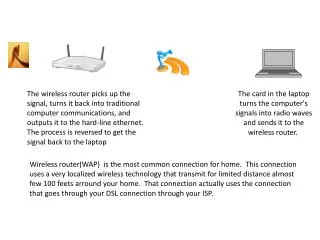
WIRELESS ANDROS - Fall 03 • Senior Design Project – Reverse Engineering Objective:Replacing the original analog control box by a wireless touch-screen. This system is mechanical, large, heavy, and connected to the robot by a cable, which makes it hard to maneuver and hard to upgrade.
WIRELESS ANDROS - Fall 03 • Senior Design Project – Reverse Engineering Methodology: i. Capture the signals from the control box using Kermit 95 Software
WIRELESS ANDROS - Fall 03 • Senior Design Project – Reverse Engineering Methodology: ii. Map the analog control box signals (21-character strings) 0A000C2000908D80C0Æññ
WIRELESS ANDROS - Fall 03 • Senior Design Project – Reverse Engineering Methodology: • Integrate the strings in touch-screen software from TERN INC. The Smart LCD Touch-Screen – Paradigm C++ Software
WIRELESS ANDROS - Fall 03 • Senior Design Project – Reverse Engineering Methodology: iv. Add Maxstream RS-232 wireless System Maxstream Wireless Unit
WIRELESS ANDROS - Fall 03 • Senior Design Project – Reverse Engineering Achievement: v. A smaller, lighter, wireless and software-based control system.
WIRELESS ANDROS - Fall 03 • Senior Design Project – NOT ADJUSTABLE • Light • Vehicle Speed • Arm Speed • All the code for ECE 400 was taken with LightON, Vehicle Speed HIGH and Arm Speed HIGH
WIRELESS ANDROS - Su 04 • Objective • Switch form touch-screen to tablet PCand create a GUI • Enhance ECE 400 Senior Design Project
WIRELESS ANDROS - Su 04 • Achievement Functional GUI that has all the functionality of the touch screen The same steps were taken: • Capture the signals from the control box using Kermit Software • Map the analog control box signals (21-character strings) • Integrate the strings in MFC code • Keep RS-232 Wireless System
WIRELESS ANDROS - Su 04 • Achievement : functional GUI that has all the functionality of the touch screen
Task 2 - WIRELESS ANDROS - Fall 04 • Enhancement • Make the GUI adjustable (as close to the original analog control box as possible) and increase functionality.
Task 2 - WIRELESS ANDROS - Fall 04 • Enhancement • Make the GUI adjustable. 0A000C2000908D80C0Æññ Arm Speed Vehicle Speed Light
Task 2 - WIRELESS ANDROS - Fall 04 • Enhancement : Improve GUI • Add Settings
Task 2 - WIRELESS ANDROS - Fall 04 • Enhancement : Improve GUI • Add Vehicle Drive Option
Conclusion • Andros is a slow but very robust robot • Climbs on up to 45 deg stairs • Goes over obstacles • Can be used as a sensor platform in (potentially) hostile environment • Keeps danger at Distance • To control Andros wirelessly means completely understanding and mastering its 21-character string commands • Andros is meant for anyone to control but is not easy to maneuver and hard to maintain • Anybody who need to go move or destroy a dangerous object • Alpha version of GUI for wireless Andros. This GUI will bring Andros to a higher level of technology while keeping it very accessible for anyone to operate
Future Work • Task 1 - ECE503 Modern Transform Methods • Task 2 - Increase initial GUI by increasing functionality • Task 3 - Sensing • Survey on robot sensing • Develop vehicle inspection scenarios • Add GUI option for sensing • Task 4 - Autonomy • Survey on robot autonomy • Add GUI option for autonomy
Andros II Reaching under vehicle
Andros II Reaching near object
Andros II Reaching over object
Andros II Sensor Mount
THANK YOU !!! Questions?