Exploring Frame Presentations in Topology: Concepts and Applications by Dr. Christopher Townsend
In this talk, Dr. Christopher Townsend presents an intricate overview of frame presentations within the realm of topology. He outlines key assumptions, including the structure of presentations and the relationships between categories such as frames and locales. The objectives include demonstrating varied flavors of frame presentations, their interaction with toposes, and their foundational role in topological constructions. Townsend elucidates the significance of geometric morphisms and pullback stability while addressing practical applications. Essential for researchers in topology and category theory, this presentation bridges theory with tangible implications.

Exploring Frame Presentations in Topology: Concepts and Applications by Dr. Christopher Townsend
E N D
Presentation Transcript
Presentations for Topology Dr Christopher Townsend (Open University)
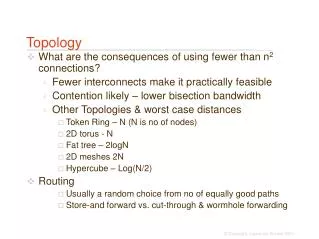
Common Language • We have the following assumptions for the talk: • (a) What a presentation is. I.e. what A=Alg<G R> means • (b) The category of frames (Objects: complete Heyting algebras. Morphisms: preserve all joins and finite meets) • (c) The category of Locales (Loc) = the opposite of the category of frames. Power locales. • (d ) Locales are important… • a good framework for topology • a first step towards generalised spaces (toposes)
Frame Presentations • Objectives for the Talk • 1) Show that frame presentations come in different flavours • 2) Show that frame presentations commute with maps between toposes (frames do not) • 3) Show how the ‘flavours’ correspond to well known power locale constructions • Thereafter: Applications to describing Loc
Why Frame Presentations? • Usually, not interesting objects… but we have different flavours emerging • Each example is a ‘finitary’ (Geometric…) object • The relationship between flavours corresponds to power locale constructions • They are stable when moving from one topos to another… leading to arguments about universality of the double power locale. • IN SHORT: careful arguments about presentations correspond to important topological constructions.
Frame Presentations: 4 Flavours • A presentation is a pair (G,R) where G is a set and R are relations… OR G is a lattice and R is a relation… (DLat, ) ‘Qua Dlat’ (/\SLat, +\/) (\/SLat, +/\) (Poset, +\/+/\) Every Frame can be presented by any node...
Moving Between Presentations: (DLat, ) P_L P_U Forget (/\SLat, +\/) (\/SLat, +/\) P_U P_L (Poset, +\/+/\) I.e. power locale is action of forgetting structure on presentation
Geometric Stability f* f:EE’ a geometric morphism, f* the inverse image then: (DLat, ) P_L P_U Forget (/\SLat, +\/) (\/SLat, +/\) P_U P_L (Poset, +\/+/\) ... in E.
Pullback Stability • f:E E’a geometric morphism; so any locale X (in E’) can be pulled back to a locale in E, denoted f*X : • (Crucial Fact): If X is presented by (G,R) then f*X is presented by f*(G,R) - presentations are pullback stable. • Not only the objects (locales), but the power constructions are pullback stable via the constructions on the corresponding presentations. (Known; widely?)
Consequences of Stability In practice: f:E E’is just a continuous map between locales. I.e. f : SX SY, the topos of sheaves over X,Y respectively.Since LocSX=Loc/X (Joyal and Tierney) we can argue in Set and then pullback to Loc/X to obtain more general results. • Broad geometric techniques for arguing about locales. (Locales have points again…) • Extend to Ideal Completion of a poset • Double Power Locale Result: PPX=$^($^X) E.g.
Consequences of Double Power Result • Axiomatization of a category of spaces • Compact Open duality • Duality between compact Hausdorff and discrete. End
What I didn’t tell you about • Coverage Theorem • Categorical interpretation of Coverage Theorem.