Download
1 / 40
450 likes | 1.09k Vues
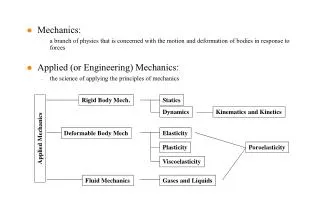
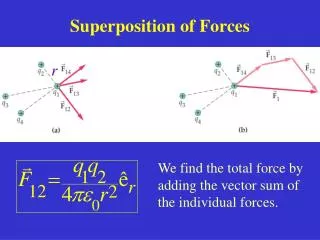
Rigid Bodies: Equivalent System of Forces. the effects of forces on a rigid body. to replace the system of forces with a simpler equivalent system. In this chapter we will study. F. R 2. R 1. W. External and Internal Forces. The External Forces

E N D
Rigid Bodies:Equivalent System of Forces Dr. Engin Aktaş
the effects of forces on a rigid body. • to replace the system of forces with a simpler equivalent system. In this chapter we will study Dr. Engin Aktaş
F R2 R1 W External and Internal Forces • The External Forces represent the action of other bodies on the rigid body under consideration. They control the external behavior of the body. • The Internal Forces • Are the forces which hold together the particles forming the rigid body. Dr. Engin Aktaş
F R2 R1 W F R2 R1 W Principle of TransmissibilityEquivalent Forces The conditions of equilibrium or motion o a rigid body will remain unchanged if a force F acting at a given point of the rigid body is replaced by a force F’, F provided on the same line of action same magnitude and direction A F’ = F=F’ B acting at a different point = Dr. Engin Aktaş
A B B B A A P1 P1 P2 P’2 (c) (a) (b) A B B B A A P2 P1 P1 P’2 (f) (e) (d) Limitation = = P1=-P2 = = P1=-P2 While the principle of transmissibility may be used freely to determine the conditions of motion or equilibrium of rigid bodies and to compute the external forces acting on these bodies, it should be avoided, or at least used with care, in determining internal forces and deformations. Dr. Engin Aktaş
Vector Product of Vectors Also referred as Cross Product of P and Q. V = P x Q V Q Line of action of V q P The magnitude of V V = P Q sinq The sense of V V Right Hand Rule Right hand’s fingers show the direction of P and when you curl your fingers toward Q the direction of your thumb is the sense of V. Dr. Engin Aktaş
Properties V The magnitude of V is the area of the parallelogram. Q Q’ V = P x Q = P x Q’ P Q x PP x Q but Q x P= -(P x Q) The vector products are not commutative The distributive property holds P x (Q1 + Q2) = P x Q1 + P x Q2 P x (Q x S) (P x Q) x S The associative property does not apply Dr. Engin Aktaş
y j i x z k i x i = k x i = j x i = i x j = k x j = j x j = i x k = k x k = j x k = j k i Vector Products Expressed in Terms of Rectangular Components 0 j - k k - i 0 - j 0 i Dr. Engin Aktaş
V = P x Q V = PxQ = (Px i + Py j + Pzk) x (Qxi + Qyj + Qzk) V = (Py Qz - Pz Qy) i + (Pz Qx - Px Qz) j + (Px Qy- Py Qx ) k Repeat first and second columns to the right. The sum of the products obtained along the red line is then subtracted from the sum of the product obtained along the black lines Dr. Engin Aktaş
Mo q O d Moment of a Force about a Point Moment of F about O F Mo = r x F r Mo A The magnitude of moment of F about O. Mo= r F sin q = F d The magnitude of Momeasures the tendency of the force F to make the rigid body rotate about a fixed axis directed along Mo. Dr. Engin Aktaş
O O Problems Involving Only Two Dimensions F F d d Mo Mo Clockwise Moment Mo = - F d points into the screen Counterclockwise Mo = + F d points out of screen Dr. Engin Aktaş
y F4 x F5 F3 z F2 F1 Varignon’s Theorem The moment about a given point O of the resultant of several concurrent forces is equal to the sum of the moments of the various forces about the same point O. (Varignon (1654-1722)) r O r x ( F1+F2+ … ) = r x F1 + r x F2 + … Dr. Engin Aktaş
Rectangular Components of the Moment of a Force y r = x i + y j + zk Fyj F = Fxi + Fyj + Fzk Mo= rxF yj Fxi r x O xi zk Mo = Mxi + Myj + Mzk Fzk z Mx = y Fz – z Fy My = z Fx – x Fz Mz= x Fy – y Fx Dr. Engin Aktaş
y Fyj (yA-yB)j MB= rA/BxF = (rA-rB) x F rA/B A Fxi B (xA-xB)i (zA-zB)k Fzk x O z zA/B = zA- zB yA/B = yA- yB xA/B = xA- xB Dr. Engin Aktaş
2-D problems y Fyj F y Fyj F A Fxi A (x,y, 0) Fxi rA/B (yA-yB)j yj r B (xA-xB)i x O MB = MBk xi O x Mo = Mzk z z MB = (xA-xB) Fy - (yA-yB) Fx Mo= (x Fy - y Fx) k Mo = Mz = x Fy - y Fx Dr. Engin Aktaş
Sample Problems Dr. Engin Aktaş
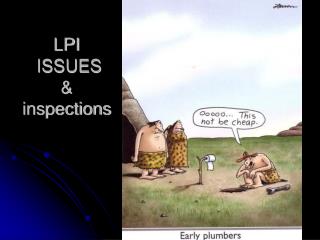
A 500 mm 60o 500 mm 60o O d A 300-N vertical force is applied to the end of a lever which is attached to a shaft at O. Determine (a) the moment of the 300-N force about O(b) the magnitude of the horizontal force applied at A which creates the same moment about O.(c) the smallest force applied at A which creates the same moment about O.(d) how far from he shaft a 750-N vertical force must act to create the same moment about O.(Beer and Johnston) 300 N O A a) Moment about O 300 N d = (0.5 m) cos 60o = 0.25 m r MO = F d =(300 N) (0.25 m) = 75.0 Nm or r = (0.5 m cos 60o) i + (0.5 m sin 60o) j = (0.25 i + 0.433 j) m F = - 300 j N MO MO = r x F = (0.25 i +0.433 j)x (-300 N) j = -75.0 k Nm Dr. Engin Aktaş
A F b) Horizontal Force 500 mm d = (0.5 m) sin 60o = 0.433 m r d MO = F d =(F) (0.433 m) = 75.0 Nm 60o F = 75.0 Nm / 0.433 m = 173.2 N O or MO r = (0.5 m cos 60o) i + (0.5 m sin 60o) j = (0.25 i + 0.433 j) m F = Fi N MO = r x F = (0.25 i +0.433 j)x (F ) i = -75.0 k Nm - 0.433 F kNm = -75.0 k Nm F = 173.2 N Dr. Engin Aktaş
30o F A B 500 mm 750 N 60o O d MO A c) Smallest Force F Since Mo = F d, when d is max F is the smallest. 500 mm d = (0.5 m) MO = F d 75.0 Nm = F (0.5 m) 60o O F = 75.0 Nm / 0.5 m = 150.0 N MO d) 750 N vertical force 75 Nm = (750 N) d d = 0.1 m OB cos 60o = d OB = 0.1 m / cos 60o = 200 mm Dr. Engin Aktaş
Fx = (693 N) j 800 N A Fx = (400 N) i B 800 N A force of 800 N acts on a bracket as shown. Determine the moment of the force about B. (Beer and Johnston) 60o A 160 mm B 200 mm MB = rA/B x F rA/B = (- 0.2 i +0.16 j ) m F = (800 N) cos 60oi + (800 N) sin 60oj = 400 i + 693 j rA/B MB = (-0.2 i + 0.16 j) x 400i + 693 j 64.0 Nm) k = (- 138.6 Nm) k - MB = 203 Nm = (- 202.6 Nm) k Dr. Engin Aktaş
200 N 60 mm y 30o 60o C B x 25 mm A z 50 mm y MAz MAx x z MA MAy A 200-N force is applied as shown to the bracket ABC. Determine the moment of the force about A. (Beer and Johnston) MA = rC/A x F A(0,-50,0) C(60,25,0) F = -(200 N) cos 30oj + (200 N) cos 60ok = -173.2 j + 100 k rC/A = (0.06 i +0.075 j ) m MA = (0.06 i + 0.075 j) x (-173.2 j + 100 k) = -10.39 k - 6 j + 7.5 i MA = 7.5 i – 6 j –10.39 k MA = 14.15 Nm Dr. Engin Aktaş
Scalar Product of Two Vectors Q scalar product or dot product P Q cos q P • Q = q P The result is a scalar Properties P • Q = Q • P Commutative P • (Q1 + Q2)= P • Q1+ P • Q2 Distributive ? X P • (Q • S)= (P • Q) • S Associative P • (Q • S) and (P • Q) • S does not have a meaning Dr. Engin Aktaş
y L MO F • C l A x O z Moment of a Force about a Given Axis Let OL be an axis through O; we define the moment MOL of F about OL as the projection OC of the moment on the axis OL. MOL= l• MO= l • (rx F) the moment MOL of F about OL measures the tendency of the force F to impart to the rigid body a motion of rotation about a fixed axis OL. Dr. Engin Aktaş
C D a A B P G E F y C D A B j i O x G k E F z Sample Problem • A cube of side a is acted upon by a force P as shown. Determine the moment of P • About A • About the edge AB • About the diagonal AG of the cube a)Moment about A rF/A = ai – aj Dr. Engin Aktaş
C D A B P l G E F b) Moment about AB c) Moment about diagonal AG. Dr. Engin Aktaş
y O x z Two forces F and –F having the same magnitude, parallel lines of action, and opposite sense are said to form a couple. Moment of a Couple rAx F + rB x (- F) = (rA – rB ) F B rA – rB = r -F d F r q M M = r x F rB The vector is called the moment of the couple; it is a vector perpendicular to the plane containing the forces and its magnitude A rA M = r F sin q d = r sin q M = F d Since the r is independent of the choice of origin O, taking moment about another point would not change the result. Thus, the M of a couple is a free vector which may be applied at any point. Dr. Engin Aktaş
M M 300 N 100 mm 100 mm y y y 200 N M 150 mm 300 N 100 mm 200 N 300 N 300 N O O O x x x 100 mm z z z Equivalent Couples This property indicates that when a couple acts on a rigid body, it does not matter where the two forces forming the couple act, or what magnitude and direction they have. The only thing which counts is the moment of the couple. Couples with the same moment will have the same effect on the rigid body. Two couples having the same moment M are equivalent, whether they are contained in the same plane or in parallel planes Dr. Engin Aktaş
P2 P2 P1 P1 Addition of Couples Consider two intersecting planes P1 and P2. - F2 -R M = r x R = r x (F1 + F2) B - F1 r F1 A R M = r x F1 + r x F2 F2 M1 M M = M1 + M2 M2 Dr. Engin Aktaş
-F d F y y y y O O O x x x O x z z z z Couples May Be Represented by Vectors M M = Fd M = = My Mx = Mz Dr. Engin Aktaş
F F A A r r O O Resolution of a Given Force into a Force at a Different Point and a Couple F F MO = A = O -F A force-couple system The force-couple system obtained by transferring a force F from a point A to a point O consists of F and a couple vector MO perpendicular to F. Conversely, any force-couple system consisting of a force F and a couple MO which are mutually perpendicular may be replaced by a single equivalent force. Dr. Engin Aktaş
140 mm y 240 mm B C 150 N x 100 N E A 180 mm z 100 N D 180 mm 150 N Sample Problem (Beer and Johnston) Determine the components of the single couple equivalent to the two couples shown 100 N 100 N Mx = - (150 N) (0.360 m) = - 54.0 N.m My = + (100 N) (0.240 m) = 24.0 N.m Mz = + (100 N) (0.180 m) = 18.00 N.m M = - (54.0 N.m) i +(24.0 N.m) j + (18.0 N.m) k Dr. Engin Aktaş
B 300 mm 400 N 200 N 60o 60 mm O 200 N 150 mm F = -(400 N) j 260 mm O O -(24 N . m) k -(60 N . m) k 150 mm -(24 N . m) k -(400 N) j Sample Problem (Beer and Johnston) Replace the couple and force shown by an equivalent single force applied to the lever. Determine the distance from the shaft to the point of application of this equivalent force. = Dr. Engin Aktaş
-(84 N . m) k 60o O O -(400 N) j C -(400 N) j = -(84 N . m) k = OC x F = ( OC cos 60oi + OC sin 60oj ) x ( -400 N) j - OC cos 60o (400 N) k -(84 N . m) k = 84 N . m 420 mm 0.42 m = OC = = cos 60o (400 N) Dr. Engin Aktaş
F2 M3 F2 M2 MOR A2 F3 R F1 F1 r2 O r1 A1 O r3 F3 O A3 M1 Reduction of a System of Forces to One Force and a Couple = = MOR = SMO = S(r x F) R = SF Dr. Engin Aktaş
Equivalent System of Forces Two systems of forces F1, F2, F3 , etc., and F’1, F’2, F’3, etc., are equivalent if, and only if, the sums of the forces and the sums of the moments about a given point O of the forces of the two systems are, respectively, equal. SMO = SM’O and SF = SF’ SFx = SF’xSFy= SF’ySFz = SF’z SMx = SM’xSMy= SM’ySMz = SM’z Dr. Engin Aktaş
150 N 250 N 100 N 600 N A B 1.2 m 1.6 m 2 m - (600 N)j - (1880 N)k B A Sample Problem (Beer and Johnston) • A 4.8 m beam is subjected to the forces shown. Reduce the given system of forces to • An equivalent force couple system at A • An equivalent force couple system at B • A single force or resultant • An equivalent force couple system at A R = SF = (150 N)j – (600 N)j + (100 N)j –(250 N)j = -(600 N)j MRA = S(r x F) = (1.6i) x (-600j) + (2.8i) x (100j) + (4.8i) x (-250j) = - (1880 N.m)k Dr. Engin Aktaş
- (600 N)j - (1880 Nm)k (2880 Nm)k B A - (600 N)j (1000 Nm)k B A b) An equivalent force couple system at B MRB= MRA+ BAx R = - (1880 N.m)k + (- 4.8m)ix (-600 N)j = - (1880 N.m)k + (2880 N.m)k = (1000 N.m)k Dr. Engin Aktaş
- (600 N)j x B A c) A single force or resultant rx R = MRA (x)ix (-600 N)j = - (1880 N.m)k -x(600 N)k = - (1880 N.m)k x = 3.13 m Dr. Engin Aktaş
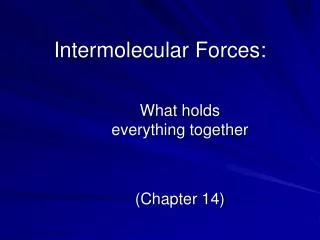
y 60 kN 200 kN C x O 40 kN 100 kN 2.5 m 2.5 m A z B 2 m 3 m y O r, m F, kN r x F, kN•m x z Sample Problem (Beer and Johnston) A square foundation mat supports the four columns shown. Determine the magnitude and point of application of the resultant of the four loads. R = SF MRO = S(r x F) -(400 kN)j 0 -200j 0 (600 kNm)i -(700 kNm)k -300k 5i -60j 100i – 200k 5i + 2.5k -40j -100j 500i – 200k 2i + 5k MRO = 600i –700k R = -400j Dr. Engin Aktaş
O z y x -(400 kN)j r x R = MOR xi (xi + zk) x (-400j) = 600i – 700k zk - 400xk + 400zi = 600i – 700k 400z = 600 - 400x = – 700 z = 1. 500 m x = 1.750 m Dr. Engin Aktaş