Enhancing Mobile DSP Unit Control and User Interface for Efficient Remote Exploration
190 likes | 309 Vues
This project focuses on expanding the functionality of the mobile DSP unit ECE 345 by enhancing its user interface and operational capabilities. Key features include a user-friendly GUI for vehicle control, real-time video feedback, and wireless remote operation. The system integrates seamlessly with Group 32's wireless data link and employs advanced mechanical designs, such as a 2-axis joystick and camera pan/tilt mechanism. The project aims to facilitate remote exploration of hazardous conditions, ensuring efficient data collection while maximizing maneuverability and ease of use.

Enhancing Mobile DSP Unit Control and User Interface for Efficient Remote Exploration
E N D
Presentation Transcript
Control and user-interface of mobile DSP unit ECE 345 Presentation Project 21 Eric Santa Dan O’Brien
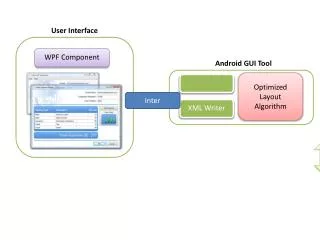
Introduction • Expand functionality of mobile DSP unit • Mechanical design completed by Dan Block • Monitor operating parameters • Create a GUI to assist in vehicle control • Provide end user with video feedback • Allow wireless, remote control of vehicle • Working in collaboration with Group 32 • Integrate their wireless data link
Objective • Benefits • Remote exploration of hazardous conditions • Remote visual data collection • Features • Easy to use GUI • Belt drive wheel system for greater maneuverability • 2-axis joystick with hat switch for vehicle and camera motion • 2-axis camera neck for complete view of surroundings
Original Design Review • Wireless camera • GUI development • Video • Motion control • Status feedback • Camera pan/tilt mechanism (neck) • Add hardware component • Neck position feedback
Camera Selection • Project is compatible with two wireless cameras • D-Link • 802.11 wireless transmission at 11Mbps • View image through java enabled web browser • Color video stream ~20fps • X-10 • Capture still shots with National Instruments frame grabber card • Black and white image
Project Build • Part Selection • GUI Layout and Features • GUI I/O Components • Neck Design and Build • Feedback Circuit Design and Build • Team 21 and 32 integration
Functional Design • JoystickDrive Motor Control
Functional Design • Potentiometer Position Feedback
Functional Design • Potentiometer Position Feedback
Performance • Potentiometer Position Feedback
Functional Design • Camera Pan/Tilt Head (“Neck”)
Successes • Completely integrated project • DirectX® Implementation (Joystick) • Wireless Camera Interface • 802.11b (present configuration) • X10™ (contingent configuration) • Visual Basic GUI Authoring • Mechanical Design and Development • Electromechanical feedback for camera
Challenges • Analog joystick hysteresis • Response time (>500 ms) • Limited range without LOS
Recommendations • Integrate with wireless LAN • Proximity sensors • Autonomous operation • Power management • Add robotic manipulator • Add off-road shock/wheel assembly
Summary • Open design environment • System Engineering and Integration • Software intensive • Simple, useful hardware components • Future lab project for GE 330