Download

1 / 5
50 likes | 187 Vues
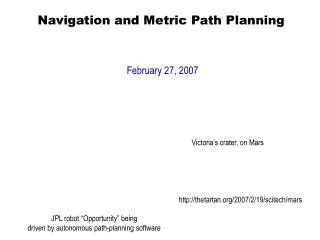
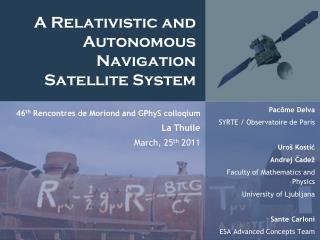
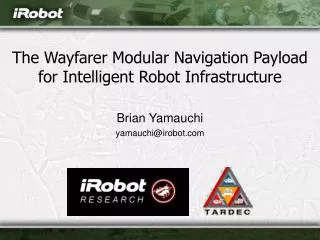
This presentation showcases our final project on autonomous robot navigation. We define the problem of efficient navigation in dynamic environments and outline our innovative solution, which leverages advanced sensors and actuators to achieve precise movement. The presentation includes a block diagram of the system, experimental hardware setup, performance metrics, and iterative testing results. We will also provide a demonstration of our working system via a video. Join us on May 3rd, 2013, at 11:00 AM to explore the future of robotics!

E N D
E190Q – Final Project PresentationAutonomous Robot Navigation Team Member 1 Name Team Member 2 Name
Problem Definition Written definition Overview image Provide performance metrics Background 1-2 slides Include 3+ references Statement of how references relates to your work Final Project Presentation
Solution Block Diagram including sensors and actuators (inputs, outputs, closed loop ) Experiment Description Hardware setup (physical dimensions of workspace, distance travelled, etc.) Software Implementation Table of experiments if applicable (e.g. how many iterations, parameter variations, etc.) Use images! Final Project Presentation
Results Plots of performance metrics Highlights of performance Demo Video and/or live demonstration of working system Conclusions Final Project Presentation
Notes: 10 minute time limit for slides All students must present Students will help with assessment Presentations at 11:00 am, Friday, May 3rd, 2013 Final Project Presentation