Dead Reckoning System for Mobile Robots
Dead Reckoning System for Mobile Robots. Lee Fithian Steven Parkinson Ajay Joseph Saba Rizvi. Dead Reckoning. Navigation Method used for Centuries Based on Measurements of Distance Traveled from a Known Point Used by Columbus to Discover the New World

Dead Reckoning System for Mobile Robots
E N D
Presentation Transcript
Dead Reckoning System for Mobile Robots Lee Fithian Steven Parkinson Ajay Joseph Saba Rizvi
Dead Reckoning • Navigation Method used for Centuries • Based on Measurements of Distance Traveled from a Known Point • Used by Columbus to Discover the New World • Robots used Dead Reckoning Based on Odometers, Accelerometers
Problem Statement • Use a mobile robot to compare accuracy of dead reckoning using odometers and accelerometers • The goal is not for us to build a robot • The robot is the means by which we will reach our goal.
Objective 1: Construct • Assemble a robot capable of • Following a specified path using odometers • Odometers based on a shaft encoder and a microcontroller • Following a specified path using accelerometers and microcontroller • Interfacing with a PC for programming and path data entry
Objective 2: Experiment • Specify a path for the robot to follow • Record the path the robot actually follows • Path specified will be drawn on butcher paper • Robot will drag a marker indicating its actual path
Objective 3: Analyze • A grid will be drawn on the butcher paper used for trials • Create a numerical comparison of accuracy between two navigation methods • Area between actual path and specified path can be calculated
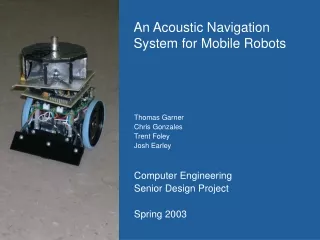
Method of Solution • Based on a Mark III Kit robot (pictured) • Modifications: • Shaft Encoders on each axle • Accelerometers added • Scoop removed • Marker mount added
Method of Solution • OOPic Microcontroller • Programmed using Java, C or VB • Serial Interface • EEPROM Onboard • Well Defined Programming Interface
Method of Solution • 600CS-ND Incremental Shaft Encoders • Clarostat Manufacturing Co. • Digital Output • 128 Pulses Per Revolution • ADXL202E Accelerometer • From Analog Devices • Digital Output • ± 2g Range, 200 mg accuracy
Validation • Need to ensure the navigation systems work at some minimum level before testing. • Robot will be required to follow a simple path with a right and left turn and three runs.
Cost Analysis • Shaft Encoders: 2 @ $46.14 • Mark III Complete Kit $98.00 • Includes OOPic • Accelerometer Kit $23.00 • Total Cost: $360.06
Conclusion • Construction • Mark III based robot with shaft encoders and accelerometers • Validation to ensure systems work at a basic level • Experimentation • Use dead reckoning navigation in trials. • Record trials on butcher paper • Analysis • Numerical analysis of which navigation method performs better.