Download
1 / 21
210 likes | 246 Vues
Develop a microphone array module for a robot to detect acoustic beacons, providing 360-degree sound localization for navigation in various environments. Project includes circuit board interface, acoustic fixtures, and algorithms for beacon detection.

E N D
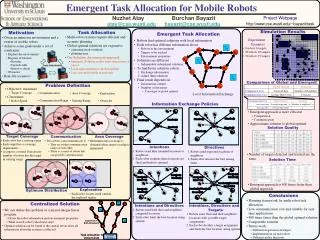
An Acoustic Navigation System for Mobile Robots Thomas Garner Chris Gonzales Trent Foley Josh Earley Computer Engineering Senior Design Project Spring 2003
Project Description The goal of this project is to develop a microphone array module that will allow a mobile robot to detect acoustic beacons in its surroundings. The array will consist of miniature microphones in a ring configuration to provide 360 degree sound localization. This will allow the robot to display a number of phonotaxis behaviors, e.g. homing in or fleeing from acoustic sources. Acoustic Navigation System for Mobile Robots
Major Goals • Develop an printed circuit board (PCB) interface for the microphone array • Develop acoustic fixtures to improve the directionality of the individual microphones • Develop algorithms to estimate the angular position of acoustic beacons Acoustic Navigation System for Mobile Robots
Implementation Robot • Controller board • Sensors • Pre-programmed PIC • Chassis • Wheels • Motors • Software • Assembly required !! Mark III Robot Acoustic Navigation System for Mobile Robots
Controller Board • OOPic microprocessor • 40-pin I/O interface • Programmed using C, Java, or Basic • Programmable via serial and parallel ports • Brains of the robot Microcontroller Acoustic Navigation System for Mobile Robots
Budget • Proposed - $481.12 • Actual - $496.26 Acoustic Navigation System for Mobile Robots
Microphone Array • Implementing 8 microphones, spaced at 45° angles • Electret condenser microphones ― best compromise between response, cost, and ease of design • Acoustic fixture is made of plexi-glass and is covered with sound dampening material ― rejects sound from sides of each microphone Acoustic Navigation System for Mobile Robots
Electret Condenser Microphone Panasonic WM-65A103 Wiring Schematic Acoustic Navigation System for Mobile Robots
Microprocessor Interface • 513 bits would be required to send full data from 8 microphones containing frequency information to the microprocessor simultaneously ― not feasible • Multiplexers simplify hardware solution and reduce the interface to 17 bits while allowing microprocessor control over the sampling process • Microprocessor decides which microphone to be currently sampled • Microprocessor also decides what frequency band to listen for on that particular microphone Acoustic Navigation System for Mobile Robots
Block Diagram of the Interface • Fabrication of two separate printed circuit boards: one for the microphone array itself and one for the interface • Allows for more modularity and ease of maintenance and fabrication Acoustic Navigation System for Mobile Robots
Design Testing Before fabrication of a PCB, the design is fully tested on a breadboard Acoustic Navigation System for Mobile Robots
Protel Schematic Developing a Schematic for a PCB • The pin out for each component is designated • A footprint must be designated for each component so that Protel can update the schematic to the PCB Acoustic Navigation System for Mobile Robots
Protel PCB A Powerful Tool • Protel automatically manages the traces between connections • Protel shows where a component should or should not be placed due to traceability • After placing components where desired, using the Protel autorouter, all traces are drawn automatically according to design rules set Acoustic Navigation System for Mobile Robots
Microphone Array PCB • Purpose mainly for acting as a mounting device for the microphones and the acoustic fixture • Contains a ground mesh on each side to reduce noise Acoustic Navigation System for Mobile Robots
PCB Manufacturing http://www.apcircuits.com Manufactures boards fairly cheaply at around $75 per board Allow Protel designs and perform professional services such as drill-thru and silk screening Acoustic Navigation System for Mobile Robots
PCB Acoustic Navigation System for Mobile Robots
Problems • Microphones do not work well in a room environment. • Software was much more of a challenge. • Debugging was difficult, software did not allow us to monitor outputs. Acoustic Navigation System for Mobile Robots
Software • Parallel port programming - does not share any of the I/O lines we used in our interface design • Initialization - establishes the I/O lines to be used for controlling the microphone and filter multiplexers, the analog-to-digital converter enable, the servos, and the signal input Acoustic Navigation System for Mobile Robots
Software calibration • Accurately compare microphone signals • Obtain an average of the ambient noise signal on each microphone and then the average maximum audio signal on each microphone • These values are stored in a global array so that they can be accessed for computation in later routines Acoustic Navigation System for Mobile Robots
Software Run • Performs sampling on each microphone Scaled value = (signal – minimum signal) * 127 (maximum signal – minimum signal) • The calculated scaled values for each microphone are then compared for the maximum value and then to a threshold value • Robot directed in the direction of the microphone receiving the greatest sound source or not to move at all Acoustic Navigation System for Mobile Robots
More information http://thomas536.homeip.net/~tlg1466/cpsc483 Acoustic Navigation System for Mobile Robots