Download
1 / 15
150 likes | 231 Vues
Explore a study on human-robot squad navigation in risky scenarios using robots to guide a person through an indoors area lacking mapping capabilities. The research presents system configuration, implementation details, and conclusions for future work.

E N D
An experiment on squad navigation of human and robots IARP/EURON Workshop on Robotics for Risky Interventions and Environmental Surveillance L. Nomdedeu, J. Sales, E. Cervera, J. Alemany, R. Sebastia, J. Penders, V. Gazi January 7th-8th, 2008 - Benicàssim (Spain)
Overview • Introduction • System configuration • Implementation • The experiment • Conclusion and future work
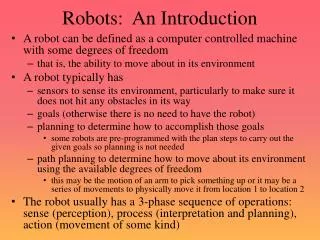
Introduction: motivation • Experiment: a set of robots (acting as a swarm) and one person. • The aim of robot-human squad: to explore an indoors area. • Fire-fighters: • no sensing capabilities • no map of the building
Introduction: statement of the problem • Our system must be able to integrate: • Exploration and obstacle avoidance • Following the human and localizing itself • Pose problem: • Tracking the human with the escorts lasers • Providing him with an accelerometer-gyroscope-magnetometer (IMU)
Introduction: related work • Laser range finders: • To find and track humans • Detecting multiple moving objects, multiple humans • Video data: • lack of visibility • Localization, obstacle avoidance, path-planning • Adaptive Monte Carlo Localization Plus • Vector Field Histogram (VFH) • Nearness Diagram (ND)
System configuration: HW setup • Robots: mobile commercial platform Erratic from Videre-design • lasers readings, • encoder data, • sonar data, • imu data
System configuration: HW setup • Fire-fighter: laptop along with an imu sensor
System configuration: SW setup • Laptop will provide the fire-fighter • an estimation of his own pose • a new orientation and velocity to take • Three roles in our human-robot system
System configuration: SW setup • Logical scheme of the system
Implementation: SW architecture • Hardware Abstraction Layer (HAL) provided by the Player platform.
Implementation: tracking • Human being localization through only the laser rangefinder data (,r): polar coordinates of the fire-fighter centroid : threshold of distance : angle of the reading
Implementation: tracking • Estimated global position and velocity of the fire-fighter: • Relative fire-fighter position and velocity • Robot’s own estimated position and velocity. • Formation rules:
The experiment • Partially tested in simulation • Robots guiding the human through our department • Human: only laptop information • Collision free path • Occlusions along the path
Conclusion and future work • We have validated the use of mobile platforms in hazardous environments as a support for human beings • More robustness can be implemented: • Supporting more unstructured environments • Improving system reliability • Improving pose fusion and prediction • Online SLAM approach • Full Human Augmented Mapping (HAM) system