Emergent Task Allocation for Mobile Robots
Emergent Task Allocation for Mobile Robots Centralized Solution We can define this problem as a mixed-integer linear program Given the robot information and environment properties What is each robot’s ideal next step?

Emergent Task Allocation for Mobile Robots
E N D
Presentation Transcript
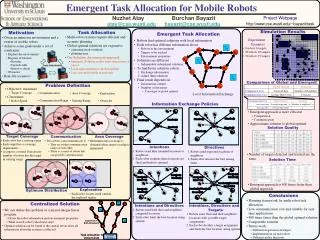
Emergent Task Allocation for Mobile Robots Centralized Solution • We can define this problem as a mixed-integer linear program • Given the robot information and environment properties • What is each robot’s ideal next step? • Optimal solution can be found at the central server after all information about the system is collected • Objective: maximize • Target Coverage • Constraints • Robot Speed • Communication • Communication Range • Area Coverage • Sensing Range • Exploration • Obstacles Problem Definition • Target Coverage • Each robot has a sensing range • Each target has a coverage requirement • A target is covered if necessary number of robots has the target in sensing range • Communication • Two robots can communicate if • They are within communication range of each other • There is a series of robots that can provide communication • Area Coverage • Maximum area coverage is obtained when sensor overlap is minimized • Exploration • Each robot locates itself outside the explored region Optimum Distribution Nuzhet Atay Burchan Bayazit atay@cse.wustl.edubayazit@cse.wustl.edu Project Webpage http://www.cse.wustl.edu/~bayazit/task Simulation Results Task Allocation Motivation Emergent Task Allocation • Multi-robot systems require efficient and accurate planning • Global optimal solutions are expensive • communication overhead • planning time • Our Solution: An emergent approach • Emergent: Solution results from interactions of robots • Local approximation to global optimal • Low cost and feasible in real-time • Given an unknown environment and a swarm of mobile robots • Achieve some goals under a set of constraints • Explore the environment • Regions of interest • Dynamic • Unpredictable • Spread or shrink • Obstacles • Real-life scenarios • Experiment Scenarios • 8 robots 6 targets • 20 robots 10 targets • 30 robots 15 targets • Robots find optimal solutions with local information • Each robot has different information about • Robots in the environment • Targets to be tracked • Environment properties • Solutions are different • Independent suboptimal solutions • To find better solution, robots • Exchange information • Adjust their solutions • Final result depends on • Information content • Number of iterations • Converges to global optimal Comparison of Global and Emergent Local Information Exchange Information Exchange Policies • Emergent approach is more efficient • Computation • Communication • Approximate solution to global optimal Solution Quality • Intentions • Robots send their intended locations to neighbors • Each robot assumes these locations are final and finds its optimal • Directives • Robots send expected locations of neighbors • Each robot chooses the best among them • Number of targets detected and tracked are the same Solution Time • Emergent approach is 400 times faster than global approach • Conclusions • Planning framework for multi-robot task allocation • Low communication cost and suitable for real-time applications • 400 times faster than the global optimal solution • Comparable solution • Future work: • Different negotiation strategies • Implementation on real robots • Different utility functions • Intentions and Directives • Robots send both their and neighbors’ computed locations • Each robot finds the best location using options • Intentions, Directives and Targets • Robots send their and their neighbors’ locations with possible target assignments • Each robot decides a target assignment and finds the best location using options