Download
1 / 9
90 likes | 258 Vues
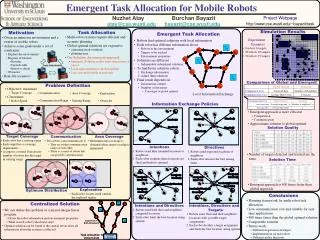
Omni-Directional Vision System for Mobile Robots. Critical Design Review. Denise Fancher Kyle Hoelscher Michael Layton Eric Miller. Omni-directional Mirror Selection. Original mirror from Neovision – $290 Light bulb from Lowe’s – two for $3 Budget decreases from $827 to $540

E N D
Omni-Directional Vision System for Mobile Robots Critical Design Review Denise Fancher Kyle Hoelscher Michael Layton Eric Miller
Omni-directional Mirror Selection • Original mirror from Neovision – $290 • Light bulb from Lowe’s – two for $3 • Budget decreases from $827 to $540 • Limited horizon on hemispherical surface • Will work for our purposes
Hardware Assembly • BOE-Bot assembled and working • CMUcam attached and testing is in progress • Plans for mounting the light bulb
Software Skeleton • Download object coordinates from camera to BOE bot • Calculate radius • Calculate appropriate movement signal • Perform collision detection • If collision eminent calculate new movement signals • Issue servo commands
Object Tracking (0,0) • Comfort radius • Adjustable • Determines if bot shouldapproach or back away from the object • Movement Determination • X-coord = turn left/right • Magnitude of y-coord determines speed of rotation Comfort radius (72,40) Radius, r Tracked objectlocation = (x,y) (144,80)
Obstacle Avoidance • Considered using vector fields for navigation • Currently planning to use a simpler algorithm • Uses data from sonar unit and left and right whiskers
CMUcam Control • Initialization • Communication from stamp to camera: • Stamp sends SEROUT followed by camera command • Stamp sends SERIN to receive data from camera • Camera sends data values followed by ACK or NCK
Basic CMUcam Commands • L1 – controls green LED on camera board • PM – controls poll mode (multiple or single data packets returned) • TC – tracks a color specified by the RGB arguments • TW – track window obtains a new color to track from the center of the window • RS – resets camera board