LLRF-ATCA LOW LEVEL APPLICATIONS
LLRF-ATCA LOW LEVEL APPLICATIONS. Tomasz Czarski Maciej Linczuk Institute of Electronic Systems, WUT, Warsaw. AGENDA. Introduction Requirements Concept and design Algorithms ATCA architecture Applications Interfaces Experimental results Development proposal Conclusions.

LLRF-ATCA LOW LEVEL APPLICATIONS
E N D
Presentation Transcript
LLRF-ATCA LOW LEVEL APPLICATIONS Tomasz Czarski Maciej Linczuk Institute of Electronic Systems, WUT, Warsaw
AGENDA • Introduction • Requirements • Concept and design • Algorithms • ATCA architecture • Applications • Interfaces • Experimental results • Development proposal • Conclusions
Low Level Applications introduction The part of Software adjacent to the Controller responsible for the arrangement of the control algorithms • TASKS: • Implementation of the procedures and data processing to provide Control Data and parameters for the Controller • Monitoring and Exception Handling for safety requirements Control a lgor i thms a r r a n g i n g field control managing e x e c u t i o n LOW & HIGH LEVEL APPLICATIONS RF SYSTEM CONTROLLER DOOCS
Outline of the LLRF control structure RF SYSTEM Tunercontrol Vector Modulator MULTI–CAVITYMODULE Klystron forward Beam detector forward reflected probes Multi–channel Down-Converter DAC Multi – channel ADC IQ C T R L Controller Core Exception Detection and Handling Control Data & Parameters Data Acquisition Memory Control Data& Parameters I/O Data COMMUNICATION C O N T R O L LOW LEVELAPPLICATIONS SYSTEM MODEL IDENTIFICATION MONITORING DATA Preprocessing HIGH LEVEL APLICATIONTS D O O C S
Requirements • Functional modes • Control - provides Control Data between pulses • Simulation – for testing • VM offset compensation – on request • Vector Sum calibration – always for new operation condition • Performance • Control Data meet requirements for cavity field control: • filling: energy efficiency = stored/expanded energy • optimal target ~74% for 0.5 ms filling • flattop: field stability : 10-5 in amplitude, 0.01° in phase • Reliability • robust algorithms • Usability • user friendly, context DOOCS GUI, on/off button operability • Interface • input/outputs to Controller, High Level Applications and DOOCS • Safety • monitoring: gradient, klystron power, quench detection • exception handling: controller off, beam off
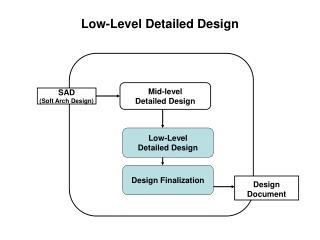
The LLA Concept & Design DATA p r e - p r o c e s s i n g Controller Cavity I/Q Detection Calibration Estimation Klystron I/Q Detection Estimation Beam Estimation Controller Estimation DOOCS Cavity gradient Vector Sum Estimation Input/output DATA Monitoring C O N T R O L Model Structure • Klystron feature • Detuning • Half-bandwidth • Coupling factors • VM offset Set-Point Loop gain DAQ Memory Parameters Inverse Model SystemIdentification Feed-Forward Set-Point Gain Coefficients Simulation Error out + – + CORRECTOR Feed-back ADC I/Q DETECTOR Vector Sum CALIBRATOR IQ DAC ~IF CONTROLLER CORE
System Model for Identification Algorithm Internal CAVITY model Klystron Output Cavity phasor { vik+1=Aik·vik + Bi·uk } Aik= 1-T(ωi1/2)k + i·T∆ωik klystron phasor {vik} uk = Dk·xk Ei uk N - channels xk ∑ Multi-Cavity model Calibration Ei·Ci= 1 vk+1=Ak·vk + B·uk Ak= 1-T(ω1/2)k + i·T∆ωk Controller phasor vk+1=Ak·vk + Fk·xk Fk= B·Dk Corrector Vector Sum feedback phasor error phasor Ci + – + {vik} ∑ Gk vk FFk SPk Gk Ci Calibrator
MULTI - CAVITY RF SYSTEM CONTROLLER - FPGA CONTROLLER Core DAQ MEMORY CONTROL TABLES C O M M U N I C A T I O N PRE- PROCESSING CONTROL DATA SYSTEM MODEL IDENTIFICATION LLA - DSP ATCA based implementation of LLA
Interfaces High Level Applications & DOOCS Operation mode Control setting: pulse, field, gain Beam parameters Cavity gradient Monitoring data Exception signals Low Level Applications ADC data: klystron out cavity probe Vector Sum Controller out Feed-Forward Set-Point Corrector Gain Calibration coefficients Simulation CONTROLLER
System Identification - Experimental resultsACC1 – cavity 4 (gradient ~11 MV/m)
Development activity proposal • Tasks realization • Low Level Applications • Data pre-processing • System Model Identification • Control Data & Parameters • Monitoring • Integration with „Communication” • LLA Simulation and integration with controller firmware simulation Schedule for 2008-2009(tightly integrated with controller design) • Development of the existing algorithm - 12 m. • Tests in simulation - 15 m. (in the background) • Operability development – 6 m. • DOOCS server integration – 6 m. • DSP implementation – 12 m. • Development team • ISE Employees • Tomasz Czarski, MSc • Maciej Linczuk, PhD • Wojciech Zabolotny, PhD • Krzysztof Pozniak, PhD • IPJ Employees • Jaroslaw Szewinski, MSc • DESY Employees/ISE PhD stud. • Waldemar Koprek, MSc • Piotr Pucyk, MSc • DMCS PhD Student • Wojciech Jałmużna, MSc
CONCLUSIONS • The Low Level Applications algorithms has been verified experimentally for feed-forward and feedback modes • ATCA carrier board with AMC modules is scaleable and flexible platform for implementation of the control algorithms with possible upgrade of future development • The Low Level Applications strongly influence the architecture of the Controller and Communication structure and shares the same hardware platform • The integrated design – packages Controller and LLA, managing by the unified team, without any division, is the only reasonable solution for the LLRF – XFEL development