Download
1 / 2
30 likes | 355 Vues
Development of a Matlab Data Acquisition and Control Toolbox for PIC Microcontrollers. Sang-Hoon Lee, Anshuman Panda, Vikram Kapila, and Hong Wong Department of Mechanical, Aerospace, and Manufacturing Engineering Polytechnic University, Brooklyn, NY 11201.

E N D
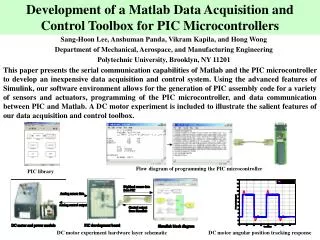
Development of a Matlab Data Acquisition and Control Toolbox for PIC Microcontrollers Sang-Hoon Lee, Anshuman Panda, Vikram Kapila, and Hong Wong Department of Mechanical, Aerospace, and Manufacturing Engineering Polytechnic University, Brooklyn, NY 11201 This paper presents the serial communication capabilities of Matlab and the PIC microcontroller to develop an inexpensive data acquisition and control system. Using the advanced features of Simulink, our software environment allows for the generation of PIC assembly code for a variety of sensors and actuators, programming of the PIC microcontroller, and data communication between PIC and Matlab. A DC motor experiment is included to illustrate the salient features of our data acquisition and control toolbox. Flow diagram of programming the PIC microcontroller PIC library DC motor angular position tracking response DC motor experiment hardware layer schematic
Synchronization of Sampled-data Chaotic Systems Sang-Hoon Lee, Anshuman Panda, Maurizio Porfiri, and Vikram Kapila Department of Mechanical, Aerospace, and Manufacturing Engineering Polytechnic University, Brooklyn, NY 11201 This paper presents the problem of synchronizing a master-slave chaotic system in the sampled-data setting. Using the discrete-time Lyapunov stability theory and the linear matrix inequality (LMI) framework, we construct a state feedback control law which yields global asymptotic synchronization of the sampled-data master-slave chaotic system. Finally, we provide an experimental validation of our results by implementing, on a set of microcontrollers endowed with RF communication capability, a sampled-data master-slave chaotic system based on Chua's circuit. Sampled-data chua's system Microcontrollers Plots of the double scroll attractors