stepper motor control
Brushless Digitally controlled motor<br>Input is give in the form of electrical pulses.Converts Electric pulses into specific rotational movements.<br>

stepper motor control
E N D
Presentation Transcript
Stepper Motor Controlusing 8051 PROJECT GUIDE- Miss. Payal Shah SUBMITTED BY- 1)YadavSachin C. 2)Shah Vishal R. 3)Shah Nigam 4)PrajapatiNayan • Department : Electrical Engineering • Parul Institute of Technology
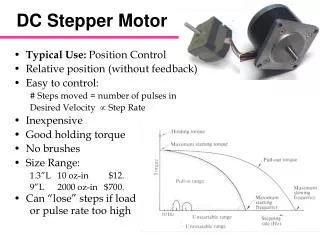
Introduction • Stepper motors are used for precision position control in many applications like floppy drives, printers, process control instruments, robotics and machine tool control. • Here is a microcontroller AT89C51-based stepper motor controller that can accurately control the rotation direction, speed and number of revolutions with help of six tactile switches.
Stepper Motor • Brushless Digitally controlled motor • Input is give in the form of electrical pulses. • Converts Electric pulses into specific rotational movements. • Divides a full rotation into a large no of steps. • Rotation in both directions.
STEP : For every input pulse the motor shaft turns through a specified number of degree called a step. • Depending on the motor, this step angle may be as small as 1 (or less) or as large as 45. The stepper motor used in the project has following characteristics: • Step Resolutions: 18 degrees per pulse. • Max revolutions per minute: 1000
Types of Stepper Motor • Permanent Magnet • Magnetic rotor • Variable Reluctance • Non Magnetic , Geared Rotor. • Hybrid • Combines characteristics from PM and VR Stepper Motors. • Magnetic , Geared Rotor.
Types of Permanent Magnet Stepper Motor • Wave Drive: Only one coil is energised in a rotatory fashion. • The bit pattern is 0001, 0010, 0100, 1000. • In this example, step angle is 90 degrees.
Half Step Drive : • The stepper motor operates at half the given steeper solution. • The bit pattern is 0001,0011,0010,0100,1100,1000,1001and 0001
Full step drive : • Two adjacent coils are energized successively in a rotary fashion. • The bit pattern will be 0011,0110,1100,1000,1001 , 0001.
Unipolar and Bipolar Stepper Motor • Bipolar Stepper Motor: • Bipolar uses entire winding at a time. • There is no centre tapping. • Bidirectional current flow through each winding. • Four wire bipolar motor.
Unipolar Stepper Motor: • There is a centre tap added between the two leads. • Unidirectional current flow in each half of the winding.
Microcontrollers • Special purpose computers. • Dedicated to one task ( i.e no Multitasking). • Low power device. • Operates on 5v dc. • In our project we are using AT89C51 MICROCONTROLLER.
AT89C51 • 4k bytes of Programmable and erasable Read Only memory. • Power consumption of 50 mW. • Manufactured by ATMEL and belongs to 8051 family. • 40 pin DIP package. • Four I/P bidirectional ports. • Two 16 bit timers/counters. continued…
Project Description • Motor : Stepper Motor • Type :Unipolar Stepper motor. • Step Angle : 18 degrees. • Step Sequence: Half step Drive. • Parameters of Stepper Motor to be controlled: • Direction • Speed • No. of Rotations
Components to be used: 1)Step down transformer 230 V/12 V 2)Regulator IC 7812 3)Microcontroller AT89C2051 4)Driver IC ULN2003A 5)Unipolar Stepper motor 6)Resistance, capacitance and LEDs 7)Potentiometer
LM7805 Voltage Regulator IC: • LM78XX • It is a three Terminal voltage regulator IC. • Gives a constant 5v output voltage. • Output Current up to 1A. • Short circuit protection. • Output voltages 5, 6, 8, 9, 10, 12 ,15, 18, 24V.
Applications • Computer-controlled stepper motors are one of the most versatile forms of positioning systems. They are typically digitally controlled as part of an open loop system, and are simpler and more rugged than closed loop servo systems. • In the field of lasers and optics they are frequently used in precision positioning equipment such as linear actuators, linear stages, rotation stages and mirror mounts. Other uses are in packaging machinery, and positioning of valve pilot stages for fluid control systems. • Commercially, stepper motors are used in floppy disk drives, flatbed scanners, computer printers, plotters, slot machines, and many more devices. • Some people looking for generators for homemade Wind Turbines found success in using stepper motors for generating power.
Industrial Applications Of Stepper Motor • Floppy Disk Drives. • Hard Disk Drives. • Printers, Plotters. • Electronic Watches. • Electronic Typewriters. • Teleprinter, Telex-machines. • Robotics. • Instrumentation control.
Conclusion • The project can be used perfectly in many areas. • The device is easy to implement in hardware and software means. • The circuit is cost effective , consume less power and take minimum time.