Motor Drives
Motor Drives. Dr. Nik Rumzi Nik Idris Dept. of Energy Conversion, UTM 2013. Conventional electric drives (variable speed). Bulky Inefficient inflexible. Modern electric drives (With power electronic converters). Small Efficient Flexible. Electric Drives. AC Drives :

Motor Drives
E N D
Presentation Transcript
Motor Drives Dr. Nik Rumzi Nik Idris Dept. of Energy Conversion, UTM 2013
Conventional electric drives (variable speed) • Bulky • Inefficient • inflexible
Modern electric drives (With power electronic converters) • Small • Efficient • Flexible
Electric Drives • AC Drives: • uses AC motors as prime movers • More difficult to control need variable AC voltage (magnitude and frequency) • DC Drives: • uses DC motors as prime movers • Easy to control need variable DC voltage
DC motors and AC motors DC motors: Regular maintenance, heavy, expensive, speed limit Easy control, decouple control of torque and flux AC motors: Less maintenance, light, less expensive, high speed Coupling between torque and flux – variable spatial angle between rotor and stator flux
Overview of AC and DC drives Extracted from Boldea & Nasar
DC DRIVES • DC Machine: • Can be operated as motor • Can be operated as generator • In basic construction, it consist of 4 terminals: • Armature terminals • Field terminals Armature terminals Field terminals
Rotor Field flux Stator DC DRIVES DC Motors - 2 pole Field circuit produces field flux
X X X X X DC DRIVES • Current flowing in armature circuit interact with field winding to produce torque DC Motors - 2 pole
X X X X X DC DRIVES • Current flowing in armature circuit interact with field winding to produce torque DC Motors - 2 pole • Torque produced is proportional to the armature current Torque • The torque will make the rotor to rotate (clockwise) • As the rotor rotates, voltage will be induced in the rotor – which is known as the back emf Torque In order to look on how the speed is control on DC motor, we need to model the DC motor with electric circuit
Ra Lf Rf La ia + ea _ + Vt _ if + Vf _ di = + f v R i L f f f dt Electric torque Armature back e.m.f. DC DRIVES The flux per pole is proportional to if
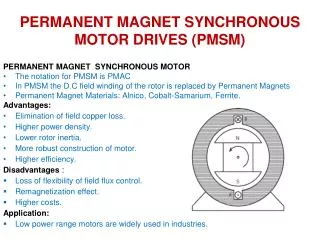
DC DRIVES • If the field flux comes from permanent magnet, the motor is called the permanent magnet DC motor • For permanent magnet DC motor, the field current CANNOT be controlled, therefore the torque and back e.m.f. can be written as ktis the torque constant keis the back e.m.f. constant • Most of the time, kt= ke
Armature circuit: • In steady state current will not change with time (dia/dt =0), • Therefore steady state speed is given by, • For the case kt = ke, DC DRIVES
Three possible methods of speed control: • Armature voltage Vt • Field flux • Armature resistance Ra DC DRIVES • Control using Ra is seldom used because it is inefficient due to the losses in the external armature resistance
DC DRIVES Controlling Vt and if using Controlled Rectifier Controlled Rectifier Controlled Rectifier if + Vt − + Vf − 3-phase supply αt αf Current if is changed by changing Vf
DC DRIVES Controlling Vt using Controlled Rectifier Controlling if using resistance Controlled Rectifier Un-controlled Rectifier if Rf + Vt − + Vf − 3-phase supply αt Current if is changed by changing Rf
DC DRIVES Example: A wound stator DC motor which is fed by a 3-phase controlled rectifier has the following parameters: Ra = 1.2 Ω, ktΦ = 0.5 Nm/amp, keΦ= 0.5 V/rad/s The amplitude of the line-line input voltage of the rectifier is 200V. If the motor runs at 1500 RPM, and the armature current is 15 A, calculate the delay angle of the rectifier. What is the torque developed? If the field is reversed and what would happen to the motor? If the current is to be maintained at 15A, what should be the delay angle of the rectifier?
DC DRIVES Example: Torque developed is Te= ktIa = 0.5 *15 = 0.5*15 = 7.5 Nm Controlled Rectifier + Vt − From DC machine equation, where Ra = 1.2 Ω, Ia = 15 A and Ea = keω. αt The given speed is in rotation per minute (RPM) and has to be converted to rad/s. Using αt can be calculated as:
DC DRIVES Controlled Rectifier Ra + Vt − + -78.5V − αt At the instant the field is reversed, the speed will remain at 1500rpm. The back emf be -78.5V. The DC machine will be operated as a generator. Hence to maintain the current at 15A,
DC DRIVES Controlling Vt using a DC-DC converter DC-DC converter Un-controlled Rectifier + Vt − + VDC − 3-phase supply Vt is change by changing the duty cyle
DC DRIVES Controlling Vt using a DC-DC converter Ra ia T1 + VDC − + Vt - D1 3-phase supply
DC DRIVES Controlling Vt using a DC-DC converter When T1 ON, vt = VDC When T1 OFF, D1 will ON and vt = 0 Ra ia ton T1 VDC + Vt - D1 0 T The voltage Vtcanbe controlled by changing the duty cycle If = duty cycle, then,
DC DRIVES Example: A permanent magnet DC motor which is fed by a DC-DC converter (BUCK converter) has the following parameters: Ra = 1.2 Ω, kt = 0.5 Nm/amp, ke= 0.5 V/rad/s When the motor runs at a speed of 1200 RPM, the torque developed by the motor is 12Nm. The DC input voltage of the converter is 200V. Calculate the duty cycle of the converter. If the period of the waveform is 20 s, draw the output voltage waveform of the converter.
DC DRIVES 12Nm of torque is due to Te/kt = 12/0.5 = 24 A of armature current. 1200 RPM is equivalent to: Ra ia T1 + Vt - Hence the back e.m.f., Ea = 125.67 *0.5 = 62.83V D1 From the motor equation, we can calculate the terminal voltage Since
DC DRIVES 9.2s 200V 0 20 s
AC DRIVES • In modern AC drive systems, the speed of the AC motor is controlled by controlling: • Magnitude of the applied voltage • Frequency of the applied voltage • Magnitude and frequency of the AC motor can be controlled by using power electronic converters • There are two most widely used inverter control technique: • Six-step voltage source inverter • PWM voltage source inverter
AC DRIVES (i) Six-step voltage source inverter (assuming available source is 3-phase supply) Controlled Rectifier 3-phase VSI Variable DC a + Vdc _ 3-phase supply b AC motor c Amplitude control A Frequency control f
AC DRIVES (i) Six-step voltage source inverter (assuming available source is 3-phase supply) With the correct switching signals to the VSI, the following voltages can be obtained: line-line voltage phase voltage
AC DRIVES (i) Six-step voltage source inverter (assuming available source is 3-phase supply) A1 Example of amplitude control A1 < A2 < A3 A2 A3
AC DRIVES (i) Six-step voltage source inverter (assuming available source is 3-phase supply) 1/f1 1/f2 1/f3 Example of frequency control f1> f2 > f3
AC DRIVES (ii) PWM voltage source inverter (assuming available source is 3-phase supply) Controlled Rectifier 3-phase VSI Fixed DC a + Vdc _ 3-phase supply b AC motor c Frequency and amplitude control A, f
AC DRIVES (ii) PWM voltage source inverter (assuming available source is 3-phase supply) With the correct switching signals to the VSI, the following voltages can be obtained: line-line voltage phase voltage
AC DRIVES (ii) PWM voltage source inverter (assuming available source is 3-phase supply) Variable amplitude
AC DRIVES (ii) PWM voltage source inverter (assuming available source is 3-phase supply) Variable frequency
AC DRIVES (ii) PWM voltage source inverter (assuming available source is 3-phase supply) Variable frequency
120o 120o 120o INDUCTION MOTOR DRIVES a Construction of induction machine c’ b’ c b a’ Stator – 3-phase winding Rotor – squirrel cage / wound
Ni / 2 - /2 -/2 -Ni / 2 INDUCTION MOTOR DRIVES Single N turn coil carrying current i Spans 180o elec Permeability of iron >> o → all MMF drop appear in airgap a a’
INDUCTION MOTOR DRIVES Distributed winding – coils are distributed in several slots Nc for each slot (3Nci)/2 (Nci)/2 -/2 - /2
INDUCTION MOTOR DRIVES Phase a – sinusoidal distributed winding Air–gap mmf F() 2
INDUCTION MOTOR DRIVES • Sinusoidal winding for each phase produces space sinusoidal MMF and flux • Sinusoidal current excitation (with frequency s) in a phase produces space sinusoidal standing wave MMF • Combination of 3 standing waves resulted in MMF wave rotating at: p – number of poles f – supply frequency
INDUCTION MOTOR DRIVES • Rotating flux induced: emf in stator winding (known as back emf) Emf in rotor winding Rotor flux rotating at synchronous frequency • Rotor current interact with flux producing torque • Rotor ALWAYS rotate at frequency less than synchronous, i.e. at slip speed (or slip frequency):sl = s – r • Ratio between slip speed and synchronous speed known as slip
INDUCTION MOTOR DRIVES Stator voltage equation: Vs = Rs Is + j(2f)LlsIs + Eag Eag – airgap voltage or back emf Eag = k f ag Rotor voltage equation: Er = Rr Ir + js(2f)Llr Er – induced emf in rotor circuit Er /s = (Rr / s) Ir + j(2f)Llr
INDUCTION MOTOR DRIVES Per–phase equivalent circuit Llr Ir Lls Rs + Vs – + Eag – + Er/s – Is Rr/s Lm Im Rs – stator winding resistance Rr – rotor winding resistance Lls – stator leakage inductance Llr – rotor leakage inductance Lm – mutual inductance s – slip
INDUCTION MOTOR DRIVES Per–phase equivalent circuit We know Eg and Er related by Where a is the winding turn ratio The rotor parameters referred to stator are: • rotor voltage equation becomes • Eg = (Rr’ / s) Ir’ + j(2f)Llr’ Ir’
Is Lls Llr’ Ir’ Rs + Eag – + Vs – Rr’/s Lm Im INDUCTION MOTOR DRIVES Per–phase equivalent circuit Rs – stator winding resistance Rr’ – rotor winding resistance referred to stator Lls – stator leakage inductance Llr’ – rotor leakage inductance referred to stator Lm – mutual inductance Ir’ – rotor current referred to stator
INDUCTION MOTOR DRIVES Power and Torque Power is transferred from stator to rotor via air–gap, known as airgap power Lost in rotor winding Converted to mechanical power = (1–s)Pag
INDUCTION MOTOR DRIVES Power and Torque Mechanical power,Pm = Temr But, ss = s - r r = (1-s)s Pag = Tems Therefore torque is given by:
INDUCTION MOTOR DRIVES Power and Torque Tem Pull out Torque (Tmax) Trated r 0 rateds sm s 1 0