Introduction to asynchronous circuit design: specification and synthesis
Introduction to asynchronous circuit design: specification and synthesis. Jordi Cortadella, Universitat Politècnica de Catalunya, Spain Michael Kishinevsky, Intel Corporation, USA Alex Kondratyev, Theseus Logic, USA Luciano Lavagno, Università di Udine, Italy. Outline.


Introduction to asynchronous circuit design: specification and synthesis
E N D
Presentation Transcript
Introduction to asynchronous circuit design:specification and synthesis Jordi Cortadella, Universitat Politècnica de Catalunya, Spain Michael Kishinevsky, Intel Corporation, USA Alex Kondratyev, Theseus Logic, USA Luciano Lavagno, Università di Udine, Italy
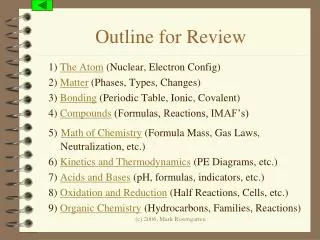
Outline • I: Introduction to basic concepts onasynchronous design • II: Synthesis of control circuits from STGs • III: Advanced topics on synthesis of controlcircuits from STGs • IV: Synthesis from HDL and other synthesis paradigmsNote: no references in the tutorial
Introduction toasynchronous circuit design: specification and synthesis Part I: Introduction to basic concepts on asynchronous circuit design
Outline • What is an asynchronous circuit ? • Asynchronous communication • Asynchronous logic blocks • Micropipelines • Control specification and implementation • Delay models • Why asynchronous circuits ?
Synchronous circuit R CL R CL R CL R CLK Implicit synchronization
Asynchronous circuit Ack R CL R CL R CL R Req Explicit synchronization: Req/Ack handshakes
Synchronous communication • Clock edges determine the time instants where data must be sampled • Data wires may glitch between clock edges (set-up/hold times must be satisfied) • Data are transmitted at a fixed rate(clock frequency) 1 1 0 0 1 0
Dual rail • Two wires per bit • “00” = spacer, “01” = 0, “10” = 1 • n-bit data communication requires 2n wires • Each bit is self-timed • Other delay-insensitive codes exist 1 1 1 0 0 0
Bundled data • Validity signal • Similar to an aperiodic local clock • n-bit data communication requires n+1 wires • Data wires may glitch when no valid • Signaling protocols • level sensitive (latch) • transition sensitive (register): 2-phase / 4-phase 1 1 0 0 1 0
Example: memory read cycle • Transition signaling, 4-phase Valid address Address A A Valid data Data D D
Example: memory read cycle • Transition signaling, 2-phase Valid address Address A A Valid data Data D D
Asynchronous modules • Signaling protocol:reqin+ start+ [computation] done+ reqout+ ackout+ ackin+reqin- start- [reset] done- reqout- ackout- ackin-(more concurrency is also possible, e.g. by overlapping the return-to-zero phase of step i-1 with the evaluation phase of step i) DATA PATH Data IN Data OUT start done req in req out CONTROL ack in ack out
A C Z B A B Z+ 0 0 0 0 1 Z 1 0 Z 1 1 1 Asynchronous latches: C element Vdd A B Z B A Z B A Z A B Gnd
A.t C.t B.t A.f C.f B.f Dual-rail logic Dual-rail AND gate Valid behavior for monotonic environment
C done Completion detection tree Completion detection • • • • • •
Differential cascode voltage switch logic start Z.f Z.t done A.t C.f B.f A.f B.t C.t start 3-input AND/NAND gate
Bundled-data logic blocks logic • • • • • • start done delay Conventional logic + matched delay
C C C delay delay delay Micropipelines (Sutherland 89) Aout Ain C L logic L logic L logic L Rin Rout
Data-path / Control L logic L logic L logic L Rin Rout CONTROL Ain Aout
Control specification A+ A B+ B A- A input B output B-
Control specification A+ B+ B A A- B-
Control specification A+ B- B A A- B+
C Control specification A+ B+ A C+ C B A- B- C-
C Control specification A+ B+ A C+ C A- B B- C-
Ro+ Ri+ Ri Ro FIFO cntrl Ao+ Ai+ Ao Ai Ro- Ri- C C Ai- Ao- Ri Ro Ao Ai Control specification
A simple filter: specification IN Ain Rin y := 0; loop x := READ (IN); WRITE (OUT, (x+y)/2); y := x; end loop filter Aout Rout OUT
+ OUT x y IN Ry Ay Rx Ax Ra Aa Rin Rout control Ain Aout A simple filter: block diagram • x and y are level-sensitive latches (transparent when R=1) • + is a bundled-data adder (matched delay between Ra and Aa) • Rin indicates the validity of IN • After Ain+ the environment is allowed to change IN • (Rout,Aout) control a level-sensitive latch at the output
+ OUT x y IN Ry Ay Rx Ax Ra Aa Rin Rout control Ain Aout Rout+ Ra+ Ry+ Rx+ Rin+ Aout+ Aa+ Ay+ Ax+ Ain+ Rout- Ra- Ry- Rx- Rin- Aout- Aa- Ay- Ax- Ain- A simple filter: control spec.
Rx Ax Aa Ry Ra Ay Aout C Ain Rout Rin Rout+ Ra+ Ry+ Rx+ Rin+ Aout+ Aa+ Ay+ Ax+ Ain+ Rout- Ra- Ry- Rx- Rin- Aout- Aa- Ay- Ax- Ain- A simple filter: control impl.
Rx Ax Aa Ry Ra Ay Aout C Ain Rout Rin Ra- Aa- Ain+ Rin- Control: observable behavior z Ain- Rin+ Rx+ Ry- z- Ax- Rx- Ay+ Ay- Ax+ Ra+ Aa+ Rout+ Aout+ z+ Rout- Aout- Ry+
x’ z+ x- x y z’ z x+ y+ z- y- Taking delays into account • Delay assumptions: • Environment: 3 times units • Gates: 1 time unit events: x+ x’- y+ z+ z’- x- x’+ z- z’+ y- time: 3 4 5 6 7 9 10 12 13 14
z+ x- x+ y+ z- y- Taking delays into account x’ x y z’ z very slow Delay assumptions: unbounded delays events: x+ x’- y+ z+ x- x’+ y- failure ! time: 3 4 5 6 9 10 11
Gate vs wire delay models • Gate delay model: delays in gates, no delays in wires • Wire delay model: delays in gates and wires
DI Delay models for async. circuits • Bounded delays (BD): realistic for gates and wires. • Technology mapping is easy, verification is difficult • Speed independent (SI): Unbounded (pessimistic) delays for gates and “negligible” (optimistic) delays for wires. • Technology mapping is more difficult, verification is easy • Delay insensitive (DI): Unbounded (pessimistic) delays for gates and wires. • DI class (built out of basic gates) is almost empty • Quasi-delay insensitive (QDI): Delay insensitive except for critical wire forks (isochronic forks). • Formally, it is the same as speed independent • In practice, different synthesis strategies are used BD SI QDI
Motivation (designer’s view) • Modularity • Plug-and-play interconnectivity • Reusability • IPs with abstract timing behaviors • High peformance • Average-case performance (no worst-case delay synchronization) • No clock skew (local timing assumptions) • Many interfaces are asynchronous • Buses, networks, ...
Motivation (technology aspects) • Low power • Automatic clock gating • Electromagnetic compatibility • No peak currents around clock edges • Robustness • High immunity to technology and environment variations (in-die variations, temperature, power supply, ...)
Dissuasion • Concurrent models for specification • CSP, Petri nets, ...: no more FSMs • Difficult to design • Hazards, synchronization • Complex timing analysis • Difficult to estimate performance • Difficult to test • No way to stop the clock
But ... some successful stories • Philips • AMULET microprocessors • Sharp • Intel (RAPPID) • IBM (interlocked pipeline) • Start-up companies: • Theseus Logic, Cogency • ...