Projection-Based Model Order Reduction Techniques in Interconnect Analysis
This chapter delves into advanced techniques for model order reduction in electrical engineering, particularly focusing on projection-based frameworks. It covers various methods for reducing complex state-space models while maintaining accuracy, including selection of basis vectors via moment matching, Krylov subspaces, and comprehensive numerical approaches. The significance of ensuring passivity in reduced models when interconnected with other circuit elements is emphasized. This exploration is crucial for simulating interconnected systems without introducing non-physical behavior, ensuring stability, and maintaining energy storage integrity.

Projection-Based Model Order Reduction Techniques in Interconnect Analysis
E N D
Presentation Transcript
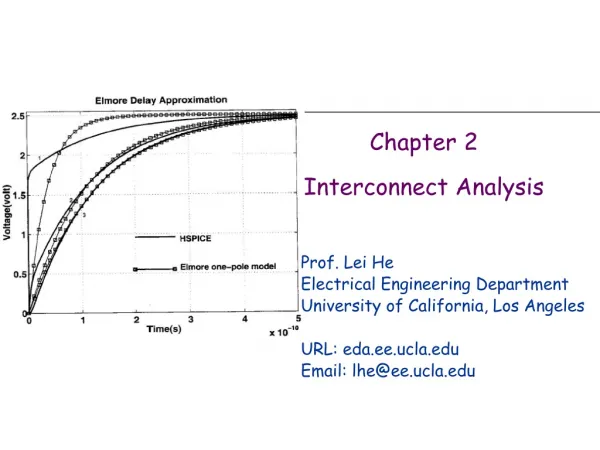
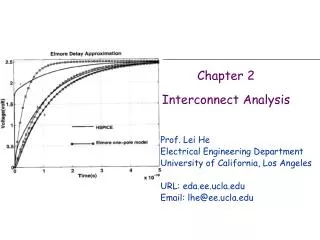
Chapter 2Interconnect Analysis Prof. Lei He Electrical Engineering Department University of California, Los Angeles URL: eda.ee.ucla.edu Email: lhe@ee.ucla.edu
Organization • Chapter 2a First/Second Order Analysis • Chapter 2b Moment calculation and AWE • Chapter 2c Projection based model order reduction
Projection Framework:Change of variables reduced state Note: q << N original state
Projection Framework • Original System • Substitute Note: now few variables (q<<N) in the state, but still thousands of equations (N)
Projection Framework (cont.) Reduction of number of equations: test multiplying by VqT If V and U biorthogonal
Projection Framework (cont.) qxn qxq nxn nxq
Projection Framework Change of variables Equation Testing
Approaches for picking V and U • Use Eigenvectors • Use Time Series Data • Compute • Use the SVD to pick q < k important vectors • Use Frequency Domain Data • Compute • Use the SVD to pick q < k important vectors • Use Singular Vectors of System Grammians? • Use Krylov Subspace Vectors?
Intuitive view of Krylov subspace choice for change of base projection matrix Taylor series expansion: • change base and use only the first few vectors of the Taylor series expansion: equivalent to match first derivatives around expansion point U
Combine point and moment matching: multipoint moment matching • Multipole expansion points give larger band • Moment (derivates) matching gives more accurate • behavior in between expansion points
Compare Pade’ Approximationsand Krylov Subspace Projection Framework • Pade approximations: • moment matching at • single DC point • numerically very • ill-conditioned!!! • Krylov Subspace Projection Framework: • multipoint moment • matching • numerically very • stable!!!
Aside on Krylov Subspaces - Definition The order k Krylov subspace generated from matrix A and vector b is defined as
Projection Framework: Moment Matching Theorem (E. Grimme 97) If and Then
Special simple case #1: expansion at s=0,V=U, orthonormal UTU=I If U and V are such that: Then the first q moments (derivatives) of the reduced system match
Need for Orthonormalization of U Vectors will line up with dominant eigenspace!
Need for Orthonormalization of U (cont.) • In "change of base matrix" U transforming to the new reduced state space, we can use ANY columns that span the reduced state space • In particular we can ORTHONORMALIZE the Krylov subspace vectors
For i = 1 to k Generates k+1 vectors! For j = 1 to i Orthogonalize new vector Normalize new vector Orthonormalization of U:The Arnoldi Algorithm
Special case #2: expansion at s=0, biorthogonal VTU=I If U and V are such that: Then the first 2q moments of reduced system match
PVL: Pade Via Lanczos[P. Feldmann, R. W. Freund TCAD95] • PVL is an implementation of the biorthogonal case 2: Use Lanczos process to biorthonormalize the columns of U and V: gives very good numerical stability
Case #3: Intuitive view of subspace choice for general expansion points • In stead of expanding around only s=0 we can expand around another points • For each expansion point the problem can then be put again in the standard form
s2 s1 s1=0 s3 Case #3: Intuitive view of Krylov subspace choice for general expansion points (cont.) Hence choosing Krylov subspace matches first kj of transfer function around each expansion point sj
Interconnected Systems • In reality, reduced models are only useful when connected together with other models and circuit elements in a composite simulation • Consider a state-space model connected to external circuitry (possibly with feedback!) ROM • Can we assure that the simulation of the composite system will be well-behaved? At least preclude non-physical behavior of the reduced model?
Passivity • Passive systems do not generate energy. We cannot extract out more energy than is stored. A passive system does not provideenergy that is not in its storage elements. • If the reduced model is not passive it can generate energy from nothingness and the simulation will explode
- - - - + + + + - - - - + + + + D D D D Q Q Q Q C C C C Interconnecting Passive Systems • The interconnection of stable models is not necessarily stable • BUT the interconnection of passive models is a passive model:
Positive Real Functions • A positive real function is a function internally stable with non-negative real part (no unstable poles) (real response) (no negative resistors) Hermittian=conjugate and transposed It means its real part is a positive semidefinite matrix at all frequencies
+ + - - Positive Realness & Passivity • For systems with immittance (impedance or admittance) matrix representation, positive-realness of the transfer function is equivalent to passivity ROM
Necessary conditions for passivity for Poles/Zeros • The positive-real condition on the matrix rational function implies that: • If H(s) is positive-real also its inverse is positive real • If H(s) is positive-real it has no poles in the RHP, and hence also no zeros there. • Occasional misconception : “if the system function has no poles and no zeros in the RHP the system is passive”. • It is necessary that a positive-real function have no poles or zeros in the RHP, but not sufficient.
Sufficient conditions for passivity • Sufficient conditions for passivity: Note that these are NOT necessary conditions (common misconception)
Congruence Transformations Preserve Positive Semidefinitness • Def. congruence transformation same matrix • Note: case #1 in the projection framework V=U produces congruence transformations • Property: a congruence transformation preserves the positive semidefiniteness of the matrix • Proof. Just rename • Note:
PRIMA (for preserving passivity) (Odabasioglu, Celik, Pileggi TCAD98) A different implementation of case #1: V=U, UTU=I, Arnoldi Krylov Projection Framework: Use Arnoldi: Numerically very stable
PRIMA preserves passivity • The main difference between and case #1 and PRIMA: • case #1 applies the projection framework to • PRIMA applies the projection framework to • PRIMA preserves passivity because • uses Arnoldi so that U=V and the projection becomes a congruence transformation • E and A produced by electromagnetic analysis are typically positive semidefinite while may not be. • input matrix must be equal to output matrix