Advanced Clock Tree Routing in Obstacles for ECE556 Final Project
This project addresses the challenges of designing a clock signal distribution network in the presence of obstacles. As technology advances, clock performance is crucial for overall system efficiency. We developed a multi-stage heuristic algorithm that ensures zero-skew by efficiently navigating around obstacles in a 2-D grid environment. Key phases include Rough Partitioning, Topology Generation, Tree Construction, and Tree Merging, all aimed at minimizing skew and optimizing routing. Our approach incorporates uniform wire characteristics and testing methodologies for robust performance outcomes.

Advanced Clock Tree Routing in Obstacles for ECE556 Final Project
E N D
Presentation Transcript
Clock Tree RoutingWith Obstacles A final project for ECE556 Cho, Minsik Fan, Jiong Kim, Sanghoo
Introduction • With feature size shrinking to the sub-micron stage and increasing of system frequency, clock speed becomes more critical • Clock performance directly implicate the system performance
Introduction (cont’d) • Design a “good” clock signal distribution network becomes more and more challenging • Skew has to be dealt with even the margin of error becomes more and more critical • Concept of useful skew is being looked at • Design a “good” clock tree with obstacles is even more challenging!!!
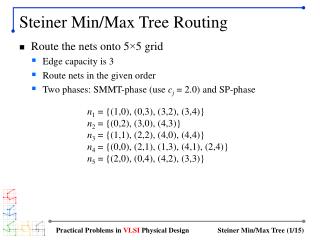
Problem Definition • Problem Definition: • For a given set of clock sinks {S}, and a given set of obstacles {OBS} • Find a zero-skew solution {P} that connected all the sinks in {S} in a 2-D grid such that • {{S} U {P}} ∩ {OBS} = 0 • {S}, {P} and {OBS} is a set of x-y coordinates in 2-D grid • Example solution is show on the right
Algorithm • Five stage algorithm • Each stage has its own detailed algorithm • The entire algorithm will be very heavily based on heuristics
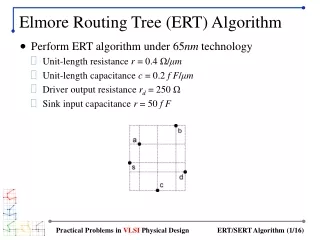
Rough Partition • Objective: • To assemble the partitions such that there is no obstacles in the middle of the partition • Input & Output: • Input: set of sinks {S} and set of obstacles {OBS} with in the boundary of {S} • Output: Bi-partition of {S}, {S1} and {S2} such that • {S1} U {S2} = {S} • {S1} ∩ {S2} = 0
Rough Partition – continue • Rough Partition phase will finish when there is no obstacles left in to be partitioned • This phase is used to avoid as much obstacles as possible • We are calling it “Obstacles Avoidance Partition”
Topology Generation • Objective: • Find the good match on set of sinks from bottom up • Input & Output: • Input: set of sinks {s} in a partition from OAP phase • Output: Tree representation {Ts} of such set of sinks
Routing Tree Construction • Objective: • Construct a set of zero skew trees • Input & Output: • Input: set of partition {P} and its tree representation {Ts} • Output: set of zero skew trees {ZST}
Tree – Bottom up phase • During the Bottom up phase tasks similar to DME is performed
Tree – Top down phase • Top down phase selects the zero skew point
Tree – Routing with Obstacles • At first, try to connect the two point directly • Whenever we meet a obstacle, try contour the obstacle by depth-first searching • try the shortest path corner of the obstacle first
Tree Merging • Bottom up approach • Objective: • To select the “best” matching pair of sub-trees produced in the previous stage • Input & Output: • Input: set of sub-tree {ZTS} • Output: merged tree {MT}
Tree Merging Clock delay
Tree Merging Clock source
Tree Merging • What if? There is no pair that can be connected because of too big skew - Divide 2 trees into 4 trees and retry Final result does not meet the spec - Retry tree merging till the result can meet the spec
Tree Merging • Routing • Will route around obstacles
Tree Balancing • Top down approach • Objective: • To minimize the skew on each clock path • Input & Output: • Input: tree {MT} from Tree Merging phase and set of sinks {S} • Output: balanced skew tree {TB}
Assumptions • Uniform wire size • Same resistance and capacitance per unit of length • Uniform sink size • All sinks has same size, i.e., 1um x 1um
Workload Distribution • All the algorithms were discussed between team members before implementation phase • OAP and topology generation – Jiong Fan • Routing Tree Construction – Sanghoon Kim • Tree Merging – Minsik Cho • Tree Balancing – ?? • To be assigned • May not be implemented • Random Obstacles Generation – ?? • May test with fixed set of obstacles first
Testing methodology • Using the input file for Steiner tree homework • Input file format • ------- Resistance per um • | ---- Capacitance per um • | | • 0.003 2.0e-17 • boundary: 0 0 70000 69984 // Upper left and lower right coordinates of die (um) • nrClkPins= 267 // Total number of nodes • 0 29322 41420 5.9e-14 // Node 1 : position x,y and node capacitance • 1 26208 51579 3.5e-14 // Node 2 • 2 35565 61661 5.3e-14 // Node 3 • . • . • .
Feather improvement • Study the improvement by incorporate wire sizing and buffer insertion in the tree balancing stage • Reduction on clock delay, thus increasing on clock frequency
Reference • “Exact Zero Skew” • Ran-Song Tsay • IEEE Int. Conference on Computer-Aided Design (ICCAD-91), pp. 336- 339, Nov. 1991. • “Zero Skew Clock Routing with Minimum Wirelength” • T.-H. Chao, Y.-C. Hsu, J.-M. Ho, K. D. Boese, and A. B. Kahng, • IEEE Trans. Circuits Syst. -II, pp. 799- 814, 1992. • “More Practical Bounded-Skew Clock Routing” • A. B. Kahng and C.-W. A. Tsao • Proc. 34th ACM/IEEE Design Automation Conf., pp. 594-599, 1997. • “UST/DME: A Clock Tree Router For General Skew Constraints” • C.-W. A. Tsao and C.-K Koh, • Proc. IEEE Intl. Conf. on Computer Aided Design, 2000
Thank you! Thank you!