BASIC CONCEPTS: RECAP
Learn about the basic concepts of rigid body motion and forces, including equilibrium conditions, types of forces, vectors, and principles of transmissibility. Explore the principles of resultant forces and the parallelogram law. Ideal for physics enthusiasts.

BASIC CONCEPTS: RECAP
E N D
Presentation Transcript
BASIC CONCEPTS: RECAP BY GP CAPT NC CHATTOPADHYAY
Rigid body • Definition:An idealized extended solid whose size and shape are definitely fixed andremain unaltered when forces are applied. • Treatment of the motion of a rigid body in terms of Newton's laws of motion leads to an understanding of certain • important aspects of the translational and rotational motion of real bodies without the necessity of considering the • complications involved when changes in size and shape occur. • Many of the principles used to treat the motion of rigid bodies apply in good approximation to the motion of real elastic solids
RIGID BODY…… CONTD • In physics, a rigid body is an idealization of a solid body of finite size in which deformation is neglected. • In other words, the distance between any two given points of a rigid body remains constant in time regardless of external forces exerted on it. • Even though such an object cannot physically exist due to actual deformation, objects can normally be assumed to be perfectly rigid if they are not moving near the speed of light
CONCEPT OF RIGID BODY The position of a rigid body is determined by the position of its center of mass and by its attitude [at least six parameters in total ]
CONCEPT OF RIGID BODY HELICOPTER FRAME AS A RIGID BODY • An un deformed body is a rigid body • No object is absolutely rigid
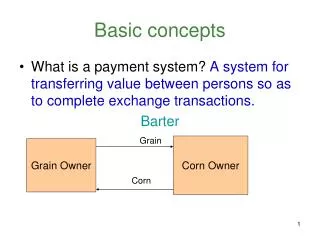
RECAP….. A force is a vector quantity that, when applied to some rigid body, has a tendency to produce translation (movement in a straight line) or translation and rotation of body. When problems are given, a force may also be referred to as a load or weight. Characteristics of force are the magnitude, direction(orientation) and point of application.
RECAP….. Concurrent Force Systems: A concurrent force system contains forces whose lines-of action meet at some one point. Forces may be tensile (pulling)
RECAP….. Concurrent Force Systems: A concurrent force system contains forces whose lines-of action meet at some one point. Forces may be compressive (pushing)
TYPES OF FORCES(LOADS) • Point loads - concentrated forces exerted at point or location • Distributed loads - a force applied along a length or over an area. The distribution can be uniform or non-uniform.
TWO EFFECTS OF FORCE The external effect, which is tendency to change the motion of the body The internal effect, which is the tendency to deform the body. Force exerted on a body has two effects:
EQUILLIBRIUM If the force system acting on a body produces no external effect, the forces are said to be in balance and the body experiences no change in motion with no unbalanced moments. Hence the body is said to be in equilibrium. SUFFICIENT CONDITIONS ARE : ∑FX = 0, ∑FY = 0 , ∑FZ =0 ∑MX = 0 ∑MY = 0 , ∑MZ =0
RECAP….. Scalar Quantity has magnitude only (not direction) and can be indicated by a point on a scale. Examples are temperature, mass, time and dollars. Vector Quantities have magnitude and direction. Examples are wind velocity, distance between to points on a map and forces.
RECAP….. The process of reducing a force system to a simpler equivalent stem is called a reduction. The process of expanding a force or a force system into a less simple equivalent system is called a resolution.
RECAP….. Collinear : If several forces lie along the same line-of –action, they are said to be collinear. Coplanar : When all forces acting on a body are in the same plane, the forces are coplanar.
TYPE OF VECTORS Free Vector - is vector which may be freely moved in space. Direction and line of action can be changed Sliding Vector- action of a force on a rigid body is represented by vectors which may move or slid along their line of action. Bound Vector or Fixed Vector- can not be moved without modifying the conditions of the problem.
PRINCIPLE OF TRANSMISSIBILITY The principle of transmissibility states that the condition of equilibrium or of motion of a rigid body will remain unchanged if a force F acting at a given point of the rigid body is replaced by a force F’ of the same magnitude and the same direction, but acting at a different point, provided that the two forces have the same line of action.
PRINCIPLE OF TRANSMISSIBILITY Line of action • This principle leads to use of sliding vectors • Only point of application is changed without altering magnitude direction
RECAP… Resultant Forces If two forces P and Q acting on a particle A may be replaced by a single force R, which has the same effect on the particle.
RECAP… Resultant Forces This force is called the resultant of the forces P and Q and may be obtained by constructing a parallelogram, using P and Q as two sides of the parallelogram. The diagonal that pass through A represents the resultant.
RECAP… Resultant Forces This is known as the parallelogram law for the addition of two forces. This law is based on experimental evidence and can be proved or derived mathematically. R=√(P2+ Q2+2PQ.COSθ)
RECAP… Resultant Forces For multiple forces action on a point, the forces can be broken into the components of x and y.
Example Problems • Determine the magnitude and direction of the resultant of the two forces.
Example Problems • Two structural members B and C are riveted to the bracket A. Knowing that the tension in member B is 6 kN and the tension in C is 10 kN, determine the magnitude and direction of the resultant force acting on the bracket.
Example Problems • Determine the magnitude and direction of P so that the resultant of P and the 900-N force is a vertical force of 2700-N directed downward.
Example Problems • A cylinder is to be lifted by two cables. Knowing that the tension in one cable is 600 N, determine the magnitude and direction of the force so that the resultant of the vertical force of 900 N.
Example Problems • Determine the force in each supporting wire.
Example Problems • The stoplight is supported by two wires. The light weighs 75-lb and the wires make an angle of 10o with the horizontal. What is the force in each wire?
Example Problems • In a ship-unloading operation, a 3500-lb automobile is supported by a cable. A rope is tied to the cable at A and pulled in order to center the automobile over its intended position. The angle between the cable and the vertical is 2o, while the angle between the rope and the horizontal is 30o. What is the tension in the rope?
Example Problems • The barge B is pulled by two tugboats A and C. At a given instant the tension in cable AB is 4500-lb and the tension in cable BC is 2000-lb. Determine the magnitude and direction of the resultant of the two forces applied at B at that instant.
Example Problems • Determine the resultant of the forces on the bolt.
Example Problems • Determine which set of force system is in equilibrium. For those force systems that are not in equilibrium, determine the balancing force required to place the body in equilibrium.
Example Problems • Two forces P and Q of magnitude P=1000-lb and Q=1200-lb are applied to the aircraft connection. Knowing that the connection is in equilibrium, determine the tensions T1 and T2.
Example Problems • Determine the forces in each of the four wires.
Example Problems • The blocks are at rest on a frictionless incline. Solve for the forces F1 and F2 required for equilibrium.
Example Problems • Length A= 5 m, and length B =10 m and angle a = 30o. Determine the angle b of the incline in order to maintain equilibrium.
Example Problems • Solve for the resisting force at pin A to maintain equilibrium.
MOMENT • Moment of force (often just moment) is the tendency of a force to twist or rotate an object; similar to torque . This is an important, basic concept in engineering and physics. • (Note: In mechanical and civil engineering, "moment" and "torque" have different meanings, while in physics they are synonyms. Moment arm is a quantity used when calculating moments of force. • The Principle of moments is if an object is balanced then the sum of the clockwise moments about a pivot is equal to the sum of the anticlockwise moments about the same pivot. • A pure moment is a special type of moment of force.
MOMENT • Moment of a vector is a generalization of the moment of force. The moment M of a vector B about the point A is • where B is the vector from point A to the position where quantity B is applied. • × represents the cross product of the vectors. • Thus M can be referred to as "the moment M with respect to the axis that goes through the point A", or simply "the moment M around A". If A is the origin, or, informally, if the axis involved is clear from context, one often omits A and says simply moment. • When B is the force, the moment of force is the torque as defined above (ROTATING BODY)
MOMENT OF A FORCE MOMENT M= r X F
VARIGNON’S THEOREM The Principle of Moments, also known as Varignon's Theorem, states that the moment of any force is equal to the algebraic sum of the moments of the components of that force. It is a very important principle that is often used in conjunction with the Principle of Transmissibility in order to solve systems of forces that are acting upon and/or within a structure
Varignon’s Theorem a theorem in mechanics that establishes the dependence between moments of forces of a given system and the moment of their resultant force. This theorem was first formulated and proved by the French scientist P. Varignon. According to Varignon’s theorem, if a system of forces Fi has a resultant force R, then the moment M0(R) of the resultant force relative to any center O (or z-axis) is equal to the sum of the moments M0(Fi) of the component forces relative to the same center O (or the same z-axis). Mathematically, Varignon’s theorem is expressed by the formulas M0(R) =ΣM0(Fi) or Mz(R) =ΣMz(Fi) Varignon’s theorem is used for solving a series of problems in mechanics (especially statics), resistance of materials, construction theories, and other areas.
COUPLE • TWO EQUAL AND OPPOSITE FORCES FORM A COUPLE • COUPLE CREATES A TURNING ACTION i.e MOMENT • MOMENT OF A COUPLE IS MC = LX F • A SINGLE FORCE DOES NOT FORM A COUPLE • MOMENT MAY BE CLOCKWISE OR ANTICLOCKWISE F COUPLE ARM= L F
CHARACTERISTICS OF A COUPLE • ALGEBRIC SUM OF FORCES FORMING COUPLE IS ZERO • ALGEBRIC SUM OF MOMENTS OF ALL FORCES CONSTITUTING A COUPLE IS EQUAL OF THE MOMENT OF THE COUPLE ITSELF • COUPLE IS BALANCED BY A COUPLE AND NOT BY A FORCE • NUMBER OF COPLANER COUPLES CAN BE REDUCED TO A SINGLE COUPLE AND IT’S MAGNITUDE ME= ∑MCi
NUMERICAL RA<350N RB< 350N 3m X=? A B 200N 400N