Chapter 7 Multivariable and Optimal Control
Chapter 7 Multivariable and Optimal Control. Time-Varying Optimal Control - deterministic systems. LQ problem (Linear Quadratic)–Finite time problem. Using Lagrange multipliers. Control gains vs. time. 10. Q2 = 0.01. 8. 6. K theta. 4. Q2 = 0.1. 2. Q2 = 1.0. 0. 0. 5. 10. 15. 20.


Chapter 7 Multivariable and Optimal Control
E N D
Presentation Transcript
Time-Varying Optimal Control - deterministic systems
LQ problem (Linear Quadratic)–Finite time problem Using Lagrange multipliers
Control gains vs. time 10 Q2 = 0.01 8 6 K theta 4 Q2 = 0.1 2 Q2 = 1.0 0 0 5 10 15 20 25 30 35 40 45 50 k 5 Q2 = 0.01 4 3 Q2 = 0.1 K theta dot 2 Q2 = 1.0 1 0 0 5 10 15 20 25 30 35 40 45 50 k
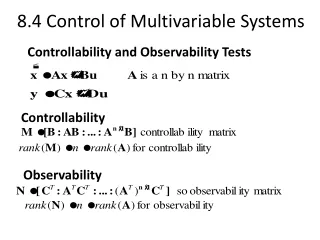
LQR (Linear Quadratic Regulator) -Infinite time problem • ARE(Algebraic Riccati Equation) • analytic solution is impossible in most cases. • numerical solution is required.
Symmetric root locus 1.5 1 0.5 Imag Axis 0 -0.5 -1 -1.5 -1.5 -1 -0.5 0 0.5 1 1.5 Real Axis
outside the unit circle inside the unit circle
Least Squares Estimation n1 unknown vector pn matrix p1 measurement error vector p1 measurement vector
Sales fit and prediction 14 12 10 8 Sales ($1000) 6 4 2 0 0 5 10 15 20 25 Months
old estimate covariance of old estimate new estimate old estimate
Sometime, it is a scalar. That is ifwe use just one new information.
Stochastic Models of Disturbance • We have dealt with well-known well-defined, ideal systems. • disturbance (process, load variation) • measurement noise sample point in sample space(event) s 0 real line new (range) sample space
X F(X, t1) X F(X, t3) F(X, t2) X(•, 3) X(•, 2) X(•, 1) t 1 0 0 t2 t3 t1