CALICE Project: DAQ Interface and Control Systems for Advanced Physics Experiments
This document outlines the design and application of the Data Acquisition (DAQ) interface for the CALICE project, specifically for the Linear Collider with Electrons. It details the connection between LAL and DAQ systems, specifications for local and remote control functionality, and the parameters and commands necessary for operating motors and sensors. The integration spans institutions including Imperial College, UCL, Cambridge, and more, focusing on the assembly and operation of command boxes that facilitate precise movements and data management in particle physics experiments.


CALICE Project: DAQ Interface and Control Systems for Advanced Physics Experiments
E N D
Presentation Transcript
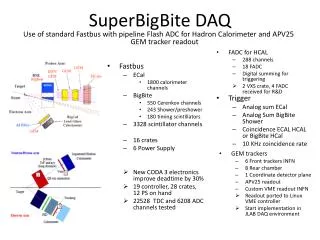
LAL,LLR,LPC,PICM VFE, PCB, mechanics, DAQ , Assembling,amorphous silicon Imperial College, UCL, Cambridge, Birmingham, Manchester, RAL DAQ , Physics studies ITEP,IHEP,MSU Tungsten, Silicon wafers Prague (IOP-ASCR) Silicon wafers SNU, KNU DAQ , PCB, Physics The CALICE project CAlorimeter for the LInear Collider with Electrons DAQ INTERFACE DAQ INTERFACE
SUMMARY Page 3 GENERAL SYNOPTIC : REMOTE CONTROL Page 4 GENERAL SYNOPTIC : LOCAL CONTROL CASE 1 Page 5 GENERAL SYNOPTIC : LOCAL CONTROL CASE 2 Page 6 DAQ EQUIPMENT CONNECTION Page 7 LAL POLICY Page 8 SUGGESTED DATAS Page 9 SUGGESTED COMMANDS
GENERAL SYNOPTIC : REMOTE CONTROL CONTROL ROOM ECAL Motor X COMMAND BOX Laptop Windows INTERFACE RS422 (Differential) 30m R232 MAIN AC 115V / 230V MAIN AC 115V / 230V Motor Y • - The COMMAND BOX drives the 2 stepper motors for X/Y movements • The remote LAPTOP, via the 232/422 INTERFACE, is connected to the COMMAND BOX with the RS422 LINK • It sends « LEVEL-1 commands » (ASCII) to the COMMAND BOX (left/right moves, reading position, etc…)
GENERAL SYNOPTIC : LOCAL CONTROL CASE 1 : WITH LAPTOP CONTROL ROOM Laptop Windows Motor X COMMAND BOX INTERFACE RS422 (Differential) X R232 30m disconnected MAIN AC 115V / 230V MAIN AC 115V / 230V Motor Y - The RS22 LINK has been disconnected from the COMMAND BOX - The LAPTOP, which has been moved LOCALLY, is now connected to the SAME connector dedicated for the RS442 LINK - The SAME functionalities as REMOTELY are available
GENERAL SYNOPTIC : LOCAL CONTROL CASE 2 CONTROL ROOM CASE 2 : WITH CONSOLE Motor X COMMAND BOX Laptop Windows INTERFACE RS422 (Differential) R232 30m MAIN AC 115V / 230V Motor Y MAIN AC 115V / 230V LOCAL CONSOLE • - The LOCAL CONSOLE has been connected to the COMMAND BOX • There is a LOCAL MODE switch (inhibits the LAPTOP commands) + a BRAKE OFF Switch (isolates the BRAKE) • - For each motor, there are 3 basic commands (PUSH Buttons) : Forward, Backward, ZERO position, plus 1 SPARE
DAQ EQUIPMENT CONNECTION Laptop Windows X To Be Defined RS422 ??? R232 Y AC AC DAQ SYSTEM LAL SCOPE OF SUPPLY • - The purpose is to DEFINE, then SPECIFY the LINK between the LAL and the DAQ systems • QUESTIONS : • which datas are required by the DAQ ? • which period of refreshment ? Cyclic, event ? On DAQ request ? • which medium is the best choice ? • Serial (baudrate ? RS232, RS422 ? Protocol ?) • Ethernet (10/100M ? Protocol ? Client/Server architecture ? ) • …
LAL POLICY Laptop Windows X To Be Defined RS422 ??? R232 Y AC AC DAQ SYSTEM LAL SCOPE OF SUPPLY - WHAT THE LAL SYSTEM PROVIDES WITH THE LAPTOP : LEVEL-1 commands (password required) : the lowest existing level ( ie frame level) LEVEL-2 set of instructions : for remote requests/commands dedicated for DAQ Graphical HMI for X/Y positions, status of the Motors, etc… - WHAT THE DAQ WILL NOT HAVE : no possibility to drive the motors via Level-1 commands : for safety reasons the only entry point for the DAQ system will be LEVEL-2 no access to the RS422 medium : for layer abstraction, required if control box changes no shared RS422 medium no possibility to adjust move speed for any axis : for safety reasons - WHAT THE LAL SYSTEM PROVIDES TO THE DAQ SYSTEM : LEVEL-2 set of instructions which are parsed and validated before sending them to the Control Box
SUGGESTED DATAS Laptop Windows X To Be Defined RS422 ??? R232 Y AC AC DAQ SYSTEM LAL SCOPE OF SUPPLY • LAL PROPOSES THE FOLLOWING DATA FOR EACH AXIS , provided at LEVEL-2 : • the DAQ system has access to them, but it is up to it to use them or not • PARAMETERS(constants) : • conversion (one Motor Step) / distance (mm) • maximum moves allowed in (mm) and (step) (X : 30cm and Y : 20cm) • preset speed for translation • VARIABLES : • current position • current gaps between current position and maximum move allowed • global status : motor health status / stepper driver status • end position sensors status • OTHER VARIABLES : • console presence status • console switches status : « Local Mode » / Y « brake off » switch / Y brake status • console push-buttons status : Forward / Backward / Zero / Spare
SUGGESTED COMMANDS Laptop Windows X To Be Defined RS422 ??? R232 Y AC AC DAQ SYSTEM LAL SCOPE OF SUPPLY • LAL PROPOSES THE FOLLOWING COMMANDS, provided at LEVEL-2 : • May change further ! • READ PARAMETERS : rp [x/y] read all parameters for X or Y axis • READ VARIABLES : rv [x/y] read all variables for X or Y axis • MOVE AXIS : mv [x/y] [value] [unit] for X or Y axis,value is according theunit : step or µm / mm / cm • MOVE ZERO AXIS X : ze [x/y] returns to reference position 0 for X or Y axis • Y BRAKE COMMAND : bky [on/off] on validates the Y brake / off inhibits it, even if Y motor is stopped • POWER MOTOR X : pox [on/off] on validates hold torque / off validates detent torque when stopped • POWER MOTOR Y : poy [on/off] on validates hold torque / off validates detent torque when stopped