Download
1 / 14
140 likes | 296 Vues
Global Posision System GPS. Litt historie. 1960: nasA & DoD are Interested in developing a satellite based position system with the following characteristics: Global coverage Continuous/all weather operational Abillity to serve high dynamic platforms

E N D
Global Posision SystemGPS Per R. Bodin
Litt historie 1960: nasA & DoD are Interested in developing a satellite based position system with the following characteristics: • Global coverage • Continuous/all weather operational • Abillity to serve high dynamic platforms • 1962: The satellite based positioning system Transit becomes operational for use on low dynamic platforms • Polar orbits • Circling the Earth evry 107 minutes • Provided 2D position fixes for each orbital pass • Time between position fixes, 35 to 100 minutes Per R. Bodin
GPS FundamentalsGps Milestones 1969: The office of Secretary of Defense establish the Defense Navigation Satellite System to work for a single joint-use positioning system and from this NAVSTAR GPS was foemed 1978: The first 4 GPS satellites are launched 1993: The Standard Positioning Service Initial Operating Capability was attained (all 24 satellites in orbit) (SPS) 1995: The Precise Positioning Sevice reached its Fully Operating Capability. (PPS) 2000: On May 1, the Selective Availability (which had degraded civil position accuracy to 100 meter) was switched off. Per R. Bodin
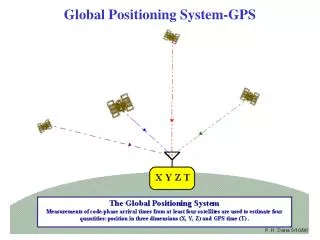
Principle of Operation 1.The fundamental technique for GPS is to use one-way ranging from the satellites. 2.The basis of the system is triangulation based on ranging from all visible satellites. 3. GPS measures distances using the travel time of a radio message. 4. To measures travel time, timing is crucial and the GPS satellites therefore need to have highly accurate clocks on board. 5. Every GPS satellite has up to 4 so-called atomic clocks and data transmission from each satellite is synchronized with GPS system time. Per R. Bodin
6. Travel time from the signal left the satellite until it is received at the GPS receiver is measured. 7. By multiplying the travel time with the speed of light (300.000km/s) the distance can be computed. 8. Once you know the distance to each satellite, you need to know where these satellites are in space. 9. GPS satellites are launched into pre-determined orbits and their positions are transmitted to the user as part of the GPS signal. 10. Knowing the satellites`position and distance to the user receiver, the geographical position of the user receiver can be computed. Per R. Bodin
11. The clocks in the GPS satellites are extremely precise while the crystal clocks used in the GPS receivers are not. 12. The inaccurate time tagging of the received signal causes a timing offset (an extra unknown parameter in the position calculation). 13. Solving for this unknown parameter can be done by making an extra satellite range that makes up for the imperfect time sync on our part needed to compute a 3D position. 4 unknown: • Latitude • Longitude • Height and • Time offset Per R. Bodin
GPS Control Segment Consists of a Master Control Station in Colorad Spring as well as Uplink and Monitor Stations responsible for monitoring and maintenance of the satellite system. Monitor Stations. • Hawaii • Ascension • Diego Garcia • Kwajalein Per R. Bodin
GPS Signal Characteristics The GPS satellites transmit a continuous signal on two frequencies, the • L1 frequency: 1575.42 MHz and • L2 frequency: 1227.60 MHZ On the L1 frequency the C/A code is avable and is used to identify the individual satellites and for determine the range between the satellite and the user receiver. The C/A code is a so-called PRN code whish is unique for each GPS satellite. The PRN code is composed of a series which have values of 1 or 0. When the received signal is compared with a copy of the signal available in the GPS receiver, instantaneous ranges for the tracked satellite can be computed. Per R. Bodin
The time (GPS Receiver Time) for when the received satellite signal (t1) arrives is compared with the time (GPS Satellite Time) for when the signal was transmitted (t0) and thus the distance to the satellite can be determined. Per R. Bodin
Provided Positioning Services Precise Positioning Service (military users only) The information modulated onto both the L1 and L2 frequencies is used to compute position data. Posistion accuracy: typicall 10 meter Standard Positioning Service (open to all users) Only the information modulated onto the L1 frequency is used to compute position data Some receivers and software can lock onto the L2 frequency and since two different frequencies penetrates the ionosphere at different speed, the inospheric delay errors can be computed! Position accuracy using L1 receivers: typically 10 – 15 meters Position accuracy L1/L2 receivers: typically 5 – 10 meters Per R. Bodin
Factors Affecting GPS Accuracy Satellite-to-use Range Estimation Due to the errors in the range measurements they will not be determined as if they were received correctly at the electrical center of the GPS antenna. When these ”incorrect” range observations are used to compute positions, position data will be reported with an error estimate, e.g. (EPE = 8.4 meter) Per R. Bodin
Ionospheric Disturbances Electrical loaded particles (electrons and protons) in the ionosphere causes radio signals travelling through the ionosphere to be delayed or lost. In periods with high ionospheric disturbances the GPS signal might be so delayed that calculated range are rejected from being used in the position calculation. In areas around equator the disturbances in the ionosphere are so rapidly changing that you may expect: • Loss of tracked satellites on the users system • Loss of tracked satellites at the reference station • Loss of transmitted corrections from Inmarsat or Spotbeam satellites Per R. Bodin
The Sun Spot Cycles The sun spot activity goes in cycles of 11 years reaching its next peak year 2001/2002. This phenomena is expected to decrease in 2003/2004. From time to time ionospheric disturbances will influence on positioning but with less magnitude compared to what has been seen during the last few years. Per R. Bodin