Download
1 / 64
640 likes | 894 Vues
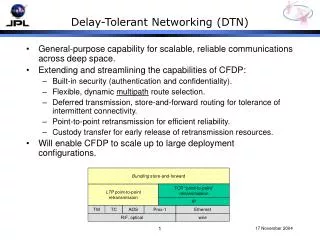
Geographical Delay Tolerant Routing: Background, Motivation, and Cost/Delay Tradeoffs. Christos Tsiaras, Argyrios Tasiopoulos , Stavros Toumpis. Organization of this talk. PART A: Introduction to Wireless Networks. PART B: Geographic Routing. PART C: Delay Tolerant Networks. PART D:

E N D
Geographical Delay Tolerant Routing: Background, Motivation, and Cost/Delay Tradeoffs Christos Tsiaras, ArgyriosTasiopoulos, Stavros Toumpis
Organization of this talk PART A: Introduction to Wireless Networks PART B: Geographic Routing PART C: Delay Tolerant Networks PART D: The minimum cost path problem in DTNs PART E: Geographic Delay Tolerant Routing
Cellular Wireless Networks Β Α PSTN, Internet, etc. • Mobile terminals communicate with others exclusively through base stations. • Mobile terminals have very little responsibility. • A wireless access network.
Truly Wireless Networks Β Α PSTN, Internet, etc. • Mobile Terminals communicate through their neighbors. • Mobile Terminals have many responsibilities. • For example, they must forward other terminals’ data. • Much more challenging.
Prehistory • Research started in the 70’s • ARPA Project • Some military communications systems came out of it (ΕΡΜΗΣ!) • Interest cooled off in the 80’s • Renewed interest in the 90’s • Wireless communications very popular • Technology became more powerful and could support algorithms. • Currently, interest is still going strong.
Preprehistory : Naval Communications at the Turn of the (Previous) Century • Problem: Stop the German High Seas Fleet going in/out of Denmark Strait • Setting: • You are in 1914, most of your ships have no wireless. Must depend on visual communication. • Fog, i.e., fading • Solution: A Hierarchical, Mobile, Visual Sensor Network. • Many other examples in history, even in antiquity
Many names for the same thing • Packet Radio Networks (70’s) • Multihop Wireless Networks (80’s) • Wireless ad hoc networks (90’s) • Mostly EE people • Mobile Ad Hoc Networks - MANETs (90’s) • Mostly CS people • Wireless Networks (future?) Question: What do you think is the reason for this constant change of names?
Special Types of Wireless Networks • Wireless Sensor Networks • Vehicular Ad Hoc Networks • Next Generation Cellular Networks • Delay Tolerant Networks • Wireless Mesh Networks • Others will come up sure enough • Commercial products exist for most of them
Wireless Network Routing • A data source must find a path to a (typically distant) destination • Path is comprised of intermediate nodes lying in between the source and the destination • Routing is much more challenging in wireless networks than in wired networks: • Bandwidth is much scarcer, and there is interference • Topology is changing much faster • Network diameter is much larger
Common approach to routing • The source asks all its neighbors for a route to the destination • These neighbors ask their neighbors • Process is repeated, until destination is contacted. • Essentially same idea as in wired networks • Adopted by DSR, AODV, TORA, DSDV, OLSR, and practically all other well known routing protocols (all these proposed in 1995-2000)
Various Engineering Decisions • Source routing vs Path vector routing • Reactive vs Proactive routing • Hierarchical vs Flat routing • Hop count versus link cost • Etc.
Basic idea of Geographic Routing • Suppose we know the location of the destination D, and the location of all our neighbors. • Let’s send the data packets to that of our neighbors, N, that seems the best suited to be the next hop (for example, it is the nearest of our neighbors to the destination)
Rules for selecting the next relay N • N is the node closest to D (Greedy Routing) • N is the node closest to the SD line (Compass Routing) • N has the largest progress (i.e. projection of SN on SD line is largest) (MFR) • N is the closest to S that is also towards D (good when channel is noisy) (NFP) • N is randomly chosen among those neighbors closer to D • N maximizes progress over cost
An example Might be selected under random selection Selected by Greedy Routing D Cannot be selected Selected by Compass Routing Selected by NFP
Advantages of Geographic Routing • Robust with respect to change of topology • Who handles the packet is unimportant, and can be decided at the very last moment. • Very little state is needed • With traditional routing, nodes need to keep (and update) routing tables and/or packets need to carry the routes they will follow • For these two reasons, it scales very well with network size.
Challenges of Geographic Routing • Location Service is needed: Source needs to know location of neighbors (easy) and the data destination (hard) • The Local Maximum Problem: While forwarding, it is possible that the best node to receive the packet is the current holder
Finding the location of destinations • Solution 1: Each node broadcasts its location to the whole network • The faster a node moves, the more often an update is needed. • The further away a node lies, the less accurate the information has to be. • Solution 2: One of the nodes is selected to store the locations of everyone • Hierarchical versions exist. • Solution 3: Nodes periodically cast rays in principal directions
Solutions to Local Maximum Problem • Solution 1: Current holder planarizes the graph and routes around faces (GPSR, Face-1, Face-2, Greedy-Face-Greedy Routing) • Solution 2: Whenever a node is a local maximum, it broadcasts the packet to all neighbors and removes itself from the network as far as packets for that destination are concerned. • Solution 3:Current holder pretends it is some place else. • Solution 4: Landmarks are used.
(My) Definition • Delay Tolerant Networks (DTNs) are networks where the delay in the delivery of a packet is much larger than the time it takes the topology to change substantially, • Either by design, • Or choice
DTN Examples • The Internet, when you try to transmit Terabits of Data • You will need a few days, during which time the topology essentially changes, due to the diurnal traffic pattern • Such volumes of data are routinely created by data centers and research facilities like CERN • WSNs with low data rates where nodes often go to sleep • Interplanetary networks • WiFi may be thought off as a kind of DTN
Zebranet: the ‘canonical’ example • Problem setting: we must monitor the behavior of a large group of zebras • Traditional solution: put collars on zebras. Each collar directly communicates with a satellite or a ground station • DTN solution: put collars on zebras, and collars are allowed to exchange information. As you are not interested in getting the information quickly, use very low power transmitters, so that resulting network is always disconnected.
Related Concepts • Intermittently Connected Networks (ICNs). • The Internet is a DTN but not an ICN • Disruption Tolerant Networks (DTNs) • Data muling
Routing on DTNs • Most common approach: epidemic routing and its variations • Instead of trying to find a route for a single packet, just send out to all your neighbors lots of replicas, and eventually one of them will get to the destination. • An obvious throughput/delay tradeoff: the more replicas there are, the smaller the throughput, but the smaller the delivery delay too.
Traditional Routing and Static Graphs • Traditional routing is studied analytically using static graphs • Network nodes → Graph vertices • Network links → Graph arcs • Link costs/delays/etc.→ Arc weights • Finding the minimum cost route from a source to a destination amounts to finding the minimum weight path in the respective graph • Dijkstra’s algorithm, Bellman-Ford’s algorithm, etc.
DTN Routing and Dynamic Graphs • In DTN routing, no single network graph exists • While a packet is routed, the network is changing! • Solution: dynamic graphs and dynamic flows • Time is slotted • For each node in the network, there is a node replica at each slot. • The node replicas are connected with arcs that take into account both the link delay and the link cost. • Observe: a packet journey across time and nodes can be associated with a single path
Dynamic Graphs in OR • Dynamic Graphs are standard tools in Operations Research • A good example is the fastest evacuation problem: • We are given a ship (the Titanic is a good example) with the locations of life boats and the passengers • Find an evacuation plan so that the ship is evacuated the fastest • Standard approach: use a dynamic graph and calculate a dynamic flow
Our Network Model • Time is divided in epochs • During epochs, properties of the network remain fixed. Network evolution happens instantaneously during epoch transitions. • Nodes are communicating over links with zero delay and some cost that reflects energy dissipation, bandwidth usage, buffer occupancy. • There is also a cost associated with storing data
Cost/Delay Evolving Graphs (C/DEGs) • There is a Replica Graph for each epoch. • Within each replica, arcs denote existing links during the corresponding epoch. • Replica graphs are connected using storage arcs, that reflect the cost of storing data at a node for the duration of a single epoch. • Collectively, the replicas with the storage arcs form a Cost/Delay Evolving Graph
Example C/DEG • A network of 4 epochs and 4 nodes.
A fundamental Cost/Delay Tradeoff • C/DEGs capture a fundamental tradeoff of DTNs: the cost of transporting a packet from node A to node B with a delay of at most T is a decreasing function of T. • If we are willing to wait for more time, the topology might become more favorable. • In the C/DEG setting, the smallest-cost journey of delay at most T is found considering all C/DEG paths of delay at most T. Increasing T implies more paths are considered.
Optimal Cost/Delay Curves (OC/DCs) • Let the Optimal Cost/Delay Curve (OC/DC) Cij(t) be the minimum cost of transporting a packet from node i at epoch 1 to node j at epoch t the latest. • Based on previous discussion, OC/DCs are non-increasing functions of t. • OC/DCs are useful because they allow us to compare the performance of practical protocols with the theoretical optimum (as we will see later on).
Efficient Calculation of OC/DCs • In principle, we could calculate the value of the OC/DC Cij(t) by finding the minimum cost path from node i at epoch 1 to node j at epoch t for all t=1,…,T • However, due to the special structure of the C/DEG, the calculation can take place faster.
Sketch of Algorithm • Find the minimum cost paths of the first replica. • For t=2 to T, • Find all minimum cost paths involving replica t, using the previous step • Gains are modest. Complexity is proportional to T, instead of TlogT
A more realistic setting (1/2) • N=1001 nodes communicating over a common wireless channel • Node 1 is immobile and acting as a base station. • Nodes move in a square region of side L=10 km. • There are T=500 epochs, each with a duration of d=10 sec. • Nodes move according to a random waypoint model with constant speed v=36 km/sec.
A more realistic setting (2/2) • Maximum communication range R=600 m • Communication cost C(d)=d2 • Long transmissions are penalized • Reasonable choice when cost is bandwidth usage • Reasonable choice also when cost is energy dissipation. • Each node 2,…,1001 wants to send a packet to the Base Station, node 1.