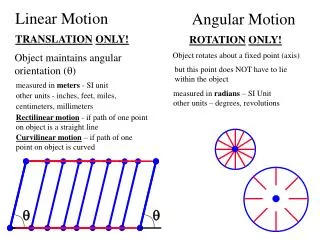
Linear motion graph problems
Linear motion graph problems. Example of v – t graph. v / ms -1 10 5. v O = 0 ms -1 v P = 10 ms -1 v Q = 10 ms -1 v R = 0 ms -1 t OP = 4 s t PQ = 4 s t QR = 2 s. P. Q. O. R. 0 2 4 6 8 10 t / s. Solution. a OP =. 10 - 0. = 2.5 ms -2. 4.

Linear motion graph problems
E N D
Presentation Transcript
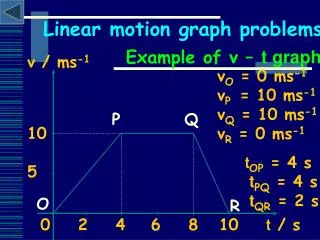
Linear motion graph problems Example of v – t graph v / ms-1 10 5 vO = 0 ms-1 vP = 10 ms-1 vQ = 10 ms-1 vR = 0 ms-1 tOP = 4 s tPQ = 4 s tQR = 2 s P Q O R 0 2 4 6 8 10 t / s
Solution aOP = 10 - 0 = 2.5 ms-2 4 vO = 0 ms-1 vP = 10 ms-1 vQ = 10 ms-1 vR = 0 ms-1 tOP = 4 s tPQ = 4 s tQR = 2 s aPQ = 0 (vconstant) aQR = 0 - 10 =-5.0 ms-2 2 dOR = ½ (10) (4+10) = 70.0 m
Linear motion graph problems d/m 20 10 -10 Example of d – t graph sP = 20 m sQ = 20 m sR = 0 m sS = - 10 m tOP = 2 s tPQ = 3 s tQR = 2 s tRS = 1 s P Q R O 0 2 4 6 8 t/s s
dP = 20 m dQ = 20 m dR = 0 m dS = - 10 m tOP = 2 s tPQ = 3 s tQR = 2 s tRS = 1 s vOP = Solution 20 =10.0 ms-1 2 vPQ = 0 (dconstant) vQR = 0 - 20 =-10.0ms-1 2 vRS = -10 - 0 = -10 ms-1 1
Explanation of displacement vOP = 10 ms-1 stop, t = 3 s d = 20 m, t = 2 s O P,Q vPQ = 0 ms-1 d = 10 m, t = 1 s d = 20 m, t = 2 s s R vQR = -10 ms-1 vRS = -10 ms-1