Understanding Torque: Stability and Equilibrium
160 likes | 257 Vues
Explore the concept of torque and its relationship to stability and equilibrium, analyzing forces and rotations in various scenarios. Learn how torque influences mechanical equilibrium and the importance of balancing forces for stability.

Understanding Torque: Stability and Equilibrium
E N D
Presentation Transcript
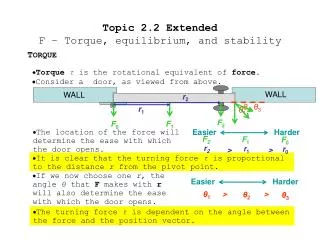
r2 r1 F2 F1 F0 WALL WALL Easier Harder Easier Harder Topic 2.2 ExtendedF – Torque, equilibrium, and stability TORQUE Torqueτis the rotational equivalent of force. Consider a door, as viewed from above. θ3 θ2 θ1 The location of the force will determine the ease with which the door opens. F2 F1 F0 r2 r1 r0 > > It is clear that the turning force τ is proportional to the distance r from the pivot point. If we now choose one r, the angle θ that F makes with r will also determine the ease with which the door opens. > > θ1 θ2 θ3 The turning force τ is dependent on the angle between the force and the position vector.
WALL WALL Definition of torque τ FYI: Torque has the same units as a force times a distance (work). But torque is not work and so is never written as joules (J). Topic 2.2 ExtendedF – Torque, equilibrium, and stability TORQUE 0.25 m 30° 80 n In fact, if θ is zero, so is the turning force τ. Finally, the turning force τ is proportional to the size of the force. Putting it all together we have τ = rFsinθ Suppose we apply a force of 80 n a distance of 25 cm from the hinge, at an angle of 30° with respect to r. Then the torque is Question: Why do we use sine instead of cosine? τ = rFsinθ = (0.25 m)(80 n)sin30° = 10 n·m
F F F F F r r r r FYI: We call the line PARALLEL to the force the force line of action. FYI: We call the line PERPENDICULAR to the force the lever arm or the moment arm. Topic 2.2 ExtendedF – Torque, equilibrium, and stability TORQUE FYI: Even though all of the forces are identical, each force produces a different rotation. Suppose we apply an identical force F to the disk at four different points. Consider a disk that can rotate about its center. Which force produces the greatest torque? Which force produces the least torque? Although Fis the same at each point, ris in a different direction: Which force/s produce/s a ccw torque? B Which force/s produce/s a cw torque? The length of the lever arm is rsin so that if we want, we can rewrite our torque equation like this: C A τ = rFsinθ D moment or lever arm τ = F(rsinθ) Thus line of action "The torque is the force times the lever arm."
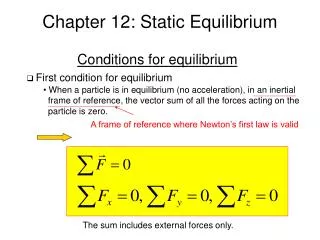
F F Condition for Rotational Equilibrium Condition for Translational Equilibrium F FYI: The disk is in rotational equilibrium but the two forces still cause the disk to have a net force up and to the left. It is NOT in translational equilibrium. Topic 2.2 ExtendedF – Torque, equilibrium, and stability FYI: If an object is in rotational equilibrium then its angular speed will NOT change. If it is not spinning it will continue to not spin. If it is spinning at a particular angular speed, it will continue to spin at that speed. EQUILIBRIUM Consider a disk that can rotate about its center. Suppose we apply two forces of equal value F to the disk at the two points shown. The force at A wants to turn the wheel ccw. The force at B wants to turn the disk cw. Thus FYI: A body is said to be in MECHANICAL EQUILIBRIUM when the conditions for BOTH rotational and translational equilibrium are satisfied. = 0 A If we reverse the force at B the conditional for rotational equilibrium is not satisfied since both forces now want to produce a ccw torque: The force at A and the force at B now cancel, though, so that the center of mass does not accelerate. Thus B F = 0
M FYI: We say that an object is in static equilibrium when it is in mechanical equilibrium AND it is not moving. Both of these situations are examples of static equilibrium. Topic 2.2 ExtendedF – Torque, equilibrium, and stability EQUILIBRIUM Suppose a uniform beam of mass m and length L is placed on two scales, as shown. It is expected thateach scale will read the same, namely half the weight of the beam. Now we place a block of mass M on the beam, closer to the left-hand scale. X It is expected that the left scale will read higher than the right one, because the block is closer to it.
L/2 mg Mg N1 N2 x FYI: We must use an extended diagram, since there are torques present. Topic 2.2 ExtendedF – Torque, equilibrium, and stability EQUILIBRIUM To analyze an extended system we use what we will call an extended free-body diagram. Find N1 and N2 in terms of x, L, m, and M and g. From our balance of forces we have ΣFy =0 N1 + N2 – Mg – mg =0 Note: We have ONE equation with TWO unknowns. We must use the balance of torques to obtain the other equation.
L/2 + mg Mg N1 N2 x FYI: If a system is in static equilibrium you can use ANY point as the pivot. NOTE: Mg and mg want to rotate the lever arm in the POSITIVE direction, and N2 provides the balancing NEGATIVE torque. Topic 2.2 ExtendedF – Torque, equilibrium, and stability EQUILIBRIUM Find N1 and N2 in terms of x, L, m, and M and g. In order to use our balance of torques we need to choose a pivot point. I have arbitrarily chosen the left end of the board as my pivot point. I have arbitrarily chosen CLOCKWISE to be a positive torque. Στ =0 0·N1 + x·Mg + (L/2)mg – L·N2=0 FYI: Choosing the pivot point at the application point of a force eliminates that force from the balance of torques equation.
L/2 + mg Mg N1 N2 m 2 xM L N2 = + g x Topic 2.2 ExtendedF – Torque, equilibrium, and stability Note: If x = L/2, N2 reduces to the expected (M + m)g/2 (exactly half the total weight). N1 will reduce to exactly the same thing. Rotational Motion and Equilibrium8-2 Torque, Equilibrium and Stability EQUILIBRIUM Find N1 and N2 in terms of x, L, m, and M and g. We now resolve our system of equations: 0·N1 + x·Mg + (L/2)mg – L·N2=0 N1 + N2 – Mg – mg =0 N1 = (M + m)g - N2
2·100 20 50 2 = + ·10 m 2 xM L N2 = + g Topic 2.2 ExtendedF – Torque, equilibrium, and stability EQUILIBRIUM Find N1 and N2 if x = 2 m, L = 20 m, the mass of the plank is 50 kg, and the mass of the block is 100 kg. We have = 350 n N1 = (M + m)g - N2 = 1150 n = (100 + 50)10- 350 Question: Why is N1 > N2?
Improper structural analysis may result in DEATH! Topic 2.2 ExtendedF – Torque, equilibrium, and stability EQUILIBRIUM Inthe previous example all of the torques were caused by perpendicular forces, so no angles were used (since sin90° = 1). Now consider the boom crane shown here: WARNING The critical components of the crane need to be designed to withstand the forces (and torques) the crane is subjected to. We need to know what tension the support cables must withstand. We need to know what forces the support pin must withstand.
T T mg mg FH FH Mg Mg FV FV Topic 2.2 ExtendedF – Torque, equilibrium, and stability EQUILIBRIUM M Let’s do some GOOD analysis! θ Here are the variables: Our goal is to find the three green forces, and the net force on the pin. m An extended free-body diagram simplifies our analysis. If L is the length of the beam, L/2 is the effective position of the beam’s weight Mg. θ x L/2 Let x be the distance mg is from the pin.
T x mg FH FV Topic 2.2 ExtendedF – Torque, equilibrium, and stability EQUILIBRIUM Suppose θ = 30°, the length of the beam is 20 m, and the mass of the beam is 400 kg. 30° x 10 60° Then our diagram reduces to… 60° ΣFx =0 T - FH =0 4000 n T = FH ΣFy =0 FV – 4000 - mg =0 FV = 4000 + mg Στ =0 10·4000sin60° +xmgsin60° - 20·Tsin30° = 0 T= 3464.1 +.866xm
T x mg FH FV Topic 2.2 ExtendedF – Torque, equilibrium, and stability EQUILIBRIUM Our three unknowns in terms of x and m are thus: 30° x 10 T= FH = 3464.1 +.866xm 60° 60° FV = 4000 + 10m 4000 n As a specific example, if m = 2000 kg, and x = 15 m, then… FV = 4000 +10·2000 = 24000 n = 29445 n T= FH = 3464.1 + .866·15·2000 To find the net force on the pin… FPIN2 = FV2 +FH2 FPIN2 = 240002 +294452 FPIN = 37987 n
FYI: The fun begins when we wish to remove the conditions of static equilibrium, as in this example... FYI: Of course, after the collapse the debris reestablish static equilibrium conditions. Topic 2.2 ExtendedF – Torque, equilibrium, and stability EQUILIBRIUM Consider a typical building shown here Vertical supports called columns transfer the weight of the building to the ground. Horizontal supports called spans transfer the weight of the floors to the columns. The building is in static equilibrium. If explosive charges are detonated at the base of the columns, the building is no longer in equilibrium.
FYI: The UNSTABLE configuration has a built-in ANTI-RESTORING FORCE that tries to remove the mass from its equilibrium position. FYI: The STABLE configuration has a built-in RESTORING FORCE that tries to return the mass to its equilibrium position. Topic 2.2 ExtendedF – Torque, equilibrium, and stability STABILITY FYI: The NEUTRAL configuration has neither built-in force. Before we talk about stability we have to define three types of equilibrium. Consider two bowls and a level table top. If we carefully place a ball on each surface it will be in equilibrium: Now we gently displace each ball to the right and observe the results... NEUTRAL UNSTABLE STABLE EQUILIBRIUM EQUILIBRIUM EQUILIBRIUM
cg mg mg mg mg mg mg mg mg mg FYI: As long as the center of gravity is DIRECTLY above the BASE OF CONTACT, the extended object is in equilibrium. Topic 2.2 ExtendedF – Torque, equilibrium, and stability FYI: If we rotate the stable extended body far enough, it will become unstable: STABILITY Now we can look at extended solids. Consider the three solids, all of which are in equilibrium. cg cg cg FYI: mg provides a restoringtorgue so that this body is in STABLE EQUILIBRIUM. FYI: mg provides an anti-restoringtorque so that this body is in UNSTABLE EQUILIBRIUM. FYI: mg provides NO torque so that this body is in NEUTRAL EQUILIBRIUM.