Development of an Ultrasonic Probe Manipulator for Lithotripsy Testing
This capstone project presents the design and development of an ultrasonic probe manipulator intended for use in lithotripsy tests. The device aims to securely hold ultrasound probes during procedures while adhering to specific requirements, such as space constraints, waterproofing, and external control. The final concept includes a sophisticated software-driven controller with a user-friendly interface, facilitating precise remote adjustments. The prototype's performance has been thoroughly evaluated against engineering requirements, with a focus on safety, environmental sustainability, and societal impact. Recommendations for future enhancements are also discussed.

Development of an Ultrasonic Probe Manipulator for Lithotripsy Testing
E N D
Presentation Transcript
Capstone Project, SP 2006 Ultrasonic Probe Manipulator Department of Mechanical Engineering, IUPUI Group: Chris Weisheim Tim Pommer Rishi Govalakrishnan Alan Koers Mentor: Dr. Jie Chen Sponsor: IU Medical School
Overview • Introduction • Reason for Design • Requirements of Design • Targets • Final Concept • Product Demonstration • Product Evaluation • Impact • Recommendations • Question and Answer
Reason for Design • To develop a device for holding an ultrasound probe while conducting lithotripsy tests
Main Requirements • Hold probe against test specimen • Meet space constraints • Waterproof • Controlled by external source
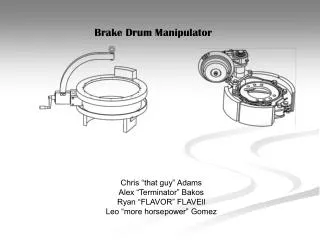
Arm/Hub Threaded Rod O.R. Shoulder Bolt Outer Ring I.R. Threaded Insert Bracket Rod Threaded Bolt Inner Ring O.R. Bearing Anchor C.A.D. Assembly Components
Controller Software-driven controller • Graphic interfaced software • Runs on Windows OS • Allows for easy control of device • Can make fine adjustments easily and remotely
Evaluation Prototype was evaluated: • Against customer requirements • Against engineering specifications • With ANSYS for FEA
Impact Safety • Hands free manipulation Environmental • Bio-friendly Society • Aids in improving impacts of Lithotripsy experiments on the blood flow in the kidneys
Recommendations Future Work: • Enhance controller • Longer, less rigid flexible shafts • Adjustable grip for different probe sizes • Enhanced locking mechanisms