Download
1 / 35
400 likes | 830 Vues
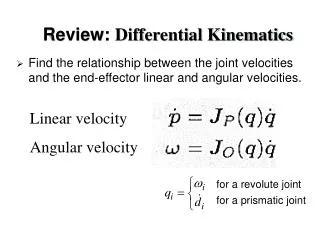
Review: Differential Kinematics. Find the relationship between the joint velocities and the end-effector linear and angular velocities. Linear velocity Angular velocity. for a revolute joint. for a prismatic joint. Review: Differential Kinematics. Approach 1.

E N D
Review: Differential Kinematics • Find the relationship between the joint velocities and the end-effector linear and angular velocities. Linear velocity Angular velocity for a revolute joint for a prismatic joint
Review: Differential Kinematics • Approach 1
Review: Differential Kinematics • Approach 2 • Prismatic joint • Revolute joint
Review: Differential Kinematics • Approach 3 The contribution of single joint i to the end-effector linear velocity The contribution of single joint i to the end-effector angular velocity
Review: Differential Kinematics • Approach 3
Kinematic Singularities • The Jacobian is, in general, a function of the configuration q; those configurations at which J is rank-deficient are termed Kinematic singularities.
Reasons to Find Singularities • Singularities represent configurations at which mobility of the structure is reduced • Infinite solutions to the inverse kinematics problem may exist • In the neighborhood of a singularity, small velocities in the operational space may cause large velocities in the joint space
Problems near Singular Positions • The robot is physically limited from unusually high joint velocities by motor power constraints, etc. So the robot will be unable to track this joint velocity trajectory exactly, resulting in some perturbation to the commanded cartesian velocity trajectory • The high accelerations that come from approaching too close to a singularity have caused the destruction of many robot gears and shafts over the years.
Classification of Singularities • Boundary singularities that occur when the manipulator is either outstretched or retracted. • Not true drawback • Internal singularities that occur inside the reachable workspace • Can cause serious problems
Example 3.2: Two-link Planar Arm • Consider only planar components of linear velocity • Consider determinant of J • Conditions for singularity
Example 3.2: Two-link Planar Arm • Conditions for sigularity • Jacobian when theta2=0
Singularity Decoupling • Computation of internal singularity via the Jacobian determinant • Decoupling of singularity computation in the case of spherical wrist • Wrist singularity • Arm singularity
Singularity Decoupling • Wrist Singularity • Z3, z4 and z5 are linearly dependent • Cannot rotate about the axis orthogonal to z4 and z3
Singularity Decoupling • Elbow Singularity • Similar to two-link planar arm • The elbow is outstretched or retracted
Singularity Decoupling • Arm Singularity • The whole z0 axis describes a continuum of singular configurations
Singularity Decoupling • Arm Singularity • A rotation of theta1 does not cause any translation of the wrist position • The first column of JP1=0 • Infinite solution • Cannot move along the z1 direction • The last two columns of JP1 are orthogonal to z1 • Well identified in operational space; • Can be suitably avoided in the path planning stage
Differential Kinematics Inversion • Inverse kinematics problem: • there is no general purpose technique • Multiple solutions may exist • Infinite solutions may exist • There might be no admissible solutions • Numerical solution technique • in general do not allow computation of all admissible solutions
Differential Kinematics Inversion • Suppose that a motion trajectory is assigned to the end effector in terms of v and the initial conditions on position and orientations • The aim is to determine a feasible joint trajectory (q(t), q’(t)) that reproduces the given trajectory • Should inverse kinematics problems be solved?
Differential Kinematics Inversion • Solution procedure: If J is not square? (redundant) If J is singular? If J is near singularity?
Analytical Jacobian • The geometric Jacobian is computed by following a geometric technique • Question: if the end effector position and orientation are specified in terms of minimal representation, is it possible to compute Jacobian via differentiation of the direct kinematics function?
Analytical Jacobian • Analytical technique
Analytical Jacobian • Analytical Jacobian • For the Euler angles ZYZ
Analytical Jacobian • From a physical viewpoint, the meaning of ώ is more intuitive than that of φ’ • On the other hand, while the integral of φ’ over time gives φ, the integral of ώ does not admit a clear physical interpretation
Statics • Determine the relationship between the generalized forces applied to the end-effector and the generalized forces applied to the joints - forces for prismatic joints, torques for revolute joints - with the manipulator at an equilibrium configuration.
fy Y0 R fx y0 x2 y2 v a2 Y1 q2 X1 a1 v v q1 0 X0 v 0 x0
Statics • Let τ denote the (n×1) vector of joint torques and γ(r ×1) vector of end effector forces (exerted on the environment) where r is the dimension of the operational space of interest
fy Y0 R fx y0 x2 y2 v a2 Y1 q2 X1 a1 v v q1 0 X0 v 0 x0
Manipulability Ellipsoids • Velocity manipulability ellipsoid • Capability of a manipulator to arbitrarily change the end effector position and orientation
Manipulability Ellipsoids • Velocity manipulability ellipsoid • Manipulability measure: distance of the manipulator from singular configurations • Example 3.6
Manipulability Ellipsoids • Force manipulability ellipsoid
Manipulability Ellipsoids • Manipulability ellipsoid can be used to analyze compatibility of a structure to execute a task assigned along a direction • Actuation task of velocity (force) • Control task of velocity (force)
Manipulability Ellipsoids • Control task of velocity (force) • Fine control of the vertical force • Fine control of the horizontal velocity
Manipulability Ellipsoids • Actuation task of velocity (force) • Actuate a large vertical force (to sustain the weight) • Actuate a large horizontal velocity