Understanding Classification: Bayesian Approaches and Maximum Likelihood Estimation
This comprehensive guide delves into classification, focusing on the nuances of Bayesian methods and maximum likelihood estimation (MLE). It covers core concepts such as underfitting, overfitting, conditional probabilities, and Bayes' Theorem. The principles of marginalization, the Univariate and Multivariate Gaussian densities, and the Beta density for Bernoulli trials are introduced. Furthermore, the text explains the Maximum A Posteriori (MAP) estimation and how to predict outcomes based on previously observed data. Key learning areas include regularization, error measurement, and practical applications in binary classification.

Understanding Classification: Bayesian Approaches and Maximum Likelihood Estimation
E N D
Presentation Transcript
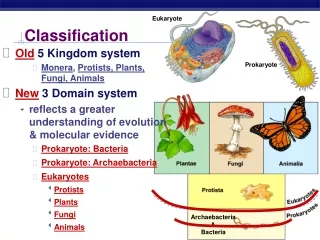
Classification Yan Pan
Non-negativity and unit measure • 0 ≤ p(y) , p() = 1, p() = 0 • Conditional probability – p(y|x) • p(x, y) = p(y|x) p(x) = p(x|y) p(y) • Bayes’ Theorem • p(y|x) = p(x|y) p(y) / p(x) • Marginalization • p(x) = yp(x, y) dy • Independence • p(x1, x2) = p(x1) p(x2) p(x1|x2) = p(x1) • Chris Bishop, “Pattern Recognition & Machine Learning” Probability Theory
p(x|,) = exp( -(x – )2/22) / (22)½ The Univariate Gaussian Density -3 -2 -1 1 2 3
p(x|,) = exp( -½(x – )t-1 (x – ) )/ (2)D/2||½ The Multivariate Gaussian Density
p(|a,b) = a-1(1 – )b-1(a+b) / (a)(b) The Beta Density
Bernoulli: Single trial with probability of success = • n {0, 1}, [0, 1] • p(n|) = n(1 – )1-n • Binomial: N iid Bernoulli trials with n successes • n {0, 1, …, N}, [0, 1], • p(n|N,) = NCnn(1 – )N-n Probability Distribution Functions
We don’t know whether a coin is fair or not. We are told that heads occurred n times in N coin flips. • We are asked to predict whether the next coin flip will result in a head or a tail. • Let y be a binary random variable such that y = 1 represents the event that the next coin flip will be a head and y = 0 that it will be a tail • We should predict heads if p(y=1|n,N) > p(y=0|n,N) A Toy Example
Let p(y=1|n,N) = and p(y=0|n,N) = 1 - so that we should predict heads if > ½ • How should we estimate ? • Assuming that the observed coin flips followed a Binomial distribution, we could choose the value of that maximizes the likelihood of observing the data • ML = argmaxp(n|) = argmaxNCnn(1 – )N-n • = argmaxn log() + (N – n) log(1 – ) • = n / N • We should predict heads if n > ½ N The Maximum Likelihood Approach
We should choose the value of maximizing the posterior probability of conditioned on the data • We assume a • Binomial likelihood : p(n|) = NCnn(1 – )N-n • Beta prior : p(|a,b)=a-1(1–)b-1(a+b)/(a)(b) • MAP = argmaxp(|n,a,b) = argmaxp(n|) p(|a,b) • = argmaxn (1 – )N-na-1 (1–)b-1 • = (n+a-1) / (N+a+b-2) as if we saw an extra a – 1 heads & b – 1 tails • We should predict heads if n > ½ (N + b – a) The Maximum A Posteriori Approach
We should marginalize over • p(y=1|n,a,b) = p(y=1|n,) p(|a,b,n) d • = p(|a,b,n) d • = (|a + n, b + N –n) d • = (n + a) / (N + a + b) as if we saw an extra a heads & b tails • We should predict heads if n > ½ (N + b – a) • The Bayesian and MAP prediction coincide in this case • In the very large data limit, both the Bayesian and MAP prediction coincide with the ML prediction (n > ½ N) The Bayesian Approach
Memorization • Can not deal with previously unseen data • Large scale annotated data acquisition cost might be very high • Rule based expert system • Dependent on the competence of the expert. • Complex problems lead to a proliferation of rules, exceptions, exceptions to exceptions, etc. • Rules might not transfer to similar problems • Learning from training data and prior knowledge • Focuses on generalization to novel data Approaches to Classification
Training Data • Set of N labeled examples of the form (xi, yi) • Feature vector – xD. X = [x1x2 … xN] • Label – y {1}. y = [y1, y2 … yN]t. Y=diag(y) • Example – Gender Identification Notation (x1 = , y1 = +1) (x2 = , y2 = +1) (x3 = , y3 = +1) (x4 = , y4 = -1)
Binary Classification b w wtx + b = 0 = [w; b]
Machine Learning from the Optimization View • Before we go into the details of classification and regression methods, we should take a close look at the objective functions of machine learning • Machine Learning:根据数据找规律(从多个候选规律里面选最好的),选择的标准是什么? • 把候选规律放到训练数据上预测一下,看看预测的错误率是多少,预测错误最少的规律就是我们要找的。
Common Form of Supervised Learning Problems • Minimize the following objective function • Regularization term + Loss function • Regularization term: control the model complexity, avoid over fitting • Loss function: measure the quality of the learned function, i.e. predict error on the training data.
Ex.1 Linear Regression • E(w)= ½Sn(yn- wtxn)^2 + ½wtw
Ex.2 Logistic Regression (classification method) • (w, b) = ½wtw+ I log(1+exp(-yi(b+wtxi)))
Ex.3 SVM • E(w)= ½wtw+ I max(0,1-yiwtxi) • Or • E(w)= ½wtw+ I max(0,1-yiwtxi)^2
How to measure error? • True: yi • Predicted: wtxi • 越像越好。相等? • I (yi!= wtxi ) • ( yi- wtxi )^2 • 假设取值范围为[-1,1]: 乘积尽量大 • yi wtxi
Approximate the Zero-One Loss • Squared Error • Exponential Loss • Logistic Loss • Hinge Loss • Sigmoid Loss
Zhu & Hastie, “KLR and the Import Vector Machine”, NIPS 01 Regularized Logistic Regression
Zhu & Hastie, “KLR and the Import Vector Machine”, NIPS 01 Regularized Logistic Regression
Convex f : f(x1 + (1- )x2) f(x1) + (1- )f(x2) • The Hessian 2f is always positive semi-definite • The tangent is always a lower bound to f Convex Functions
Iteration : xn+1 = xn - nf(xn) • Step size selection : Armijo rule • Stopping criterion : Change in f is “miniscule” Gradient Descent
(w, b) = ½wtw+ I log(1+exp(-yi(b+wtxi))) • w(w, b) =w –Ip(-yi|xi,w) yi xi • b(w, b) = –Ip(-yi|xi,w) yi • Beware of numerical issues while coding! Gradient Descent – Logistic Regression
Gradient Decent Algorithm • Input: x0, objective f(x), e, T • Output: x_star that minimize f(x) • t=0 • While (t==0 || (f(x_{t-1}) – f(x_{t})>e && T<100000 )){ • g_t = gradient of f(x) at x_t • for( i=10; i>=-6; i--) • { • s=2^i • x_{t+1}=x_t – s*g_t • if (f(x_{t+1} < f(x_t)) • break; • } • t++; • } • Output x_t
Iteration : xn+1 = xn - nH-1f(xn) • Approximate f by a 2nd order Taylor expansion • The error can now decrease quadratically Newton Methods
Newton Decent Algorithm • Input: x0, objective f(x), e, T • Output: x_star that minimize f(x) • t=0 • While (t==0 || (f(x_{t-1}) – f(x_{t})>e && T<10)){ • g_t = gradient of f(x) at x_t • h_t = hessian matrix of f(x) at x_t • s = inverse matrix of h_t • x_{t+1}=x_t – s*g_t • t++; • } • Output x_t
Computing and inverting the Hessian is expensive • Quasi-Newton methods can approximate H-1 directly (LBFGS) • Iteration : xn+1 = xn - nBn-1f(xn) • Secant equation : f(xn+1) – f(xn) = Bn+1(xn+1 – xn) • The secant equation does not fully determine B • LBFGS updates Bn+1-1 using two rank one matrices Quasi-Newton Methods
Bayes’ decision rule • p(y=+1|x) > p(y=-1|x) ? y = +1 : y = -1 • p(y=+1|x) > ½ ? y = +1 : y = -1 Bayes’ Decision Rule
p(y|x,X,Y) = fp(y,f|x,X,Y) df • = fp(y|f,x,X,Y) p(f|x,X,Y) df • = fp(y|f,x) p(f|X,Y) df • This integral is often intractable. • To solve it we can • Choose the distributions so that the solution is analytic (conjugate priors) • Approximate the true distribution of p(f|X,Y) by a simpler distribution (variational methods) • Sample from p(f|X,Y) (MCMC) Bayesian Approach
p(y|x,X,Y) = fp(y|f,x) p(f|X,Y) df • = p(y|fMAP,x) when p(f|X,Y) = (f – fMAP) • The more training data there is the better p(f|X,Y) approximates a delta function • We can make predictions using a single function, fMAP, and our focus shifts to estimating fMAP. Maximum A Posteriori (MAP)
fMAP = argmaxfp(f|X,Y) • = argmaxfp(X,Y|f) p(f) / p(X,Y) • = argmaxfp(X,Y|f) p(f) • fML argmaxfp(X,Y|f) (Maximum Likelihood) • Maximum Likelihood holds if • There is a lot of training data so that • p(X,Y|f) >> p(f) • Or if there is no prior knowledge so that p(f) is uniform (improper) MAP & Maximum Likelihood (ML)
fML = argmaxfp(X,Y|f) • = argmaxfIp(xi,yi|f) • The independent and identically distributed assumption holds only if we know everything about the joint distribution of the features and labels. • In particular, p(X,Y) Ip(xi,yi) IID Data