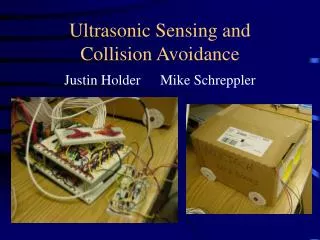
Remote Controlled Wheelchair With Collision Avoidance
Remote Controlled Wheelchair With Collision Avoidance. Joseph D’Amato Husein Rashed Steven Ostertag Rohan Vivek T.S. Rockwell. The System. Hardware The Raspberry Pi (vs Arduino) Better Support – Python Better Development Environment – SSH, HDMI Output

Remote Controlled Wheelchair With Collision Avoidance
E N D
Presentation Transcript
Remote Controlled WheelchairWith Collision Avoidance Joseph D’Amato Husein Rashed Steven Ostertag Rohan Vivek T.S. Rockwell
The System • Hardware • The Raspberry Pi (vs Arduino) • Better Support – Python • Better Development Environment – SSH, HDMI Output • Tradeoff – Less ideal for real-time system • User Input • The WiiMote • Bluetooth Interface • Well defined python module available • The Joystick • Inexpensive • USB Interface • Well defined python module available • Sensor Input – Ultrasonic • Used for similar applications in cars (backup sensor) • Cheap • Easy to use • Motor Control • Controlled with PWM from the Pi
The System • System Operation • User in Chair • Operates chair in same manner as standard electric wheelchair • Remote User • Has ability to gain control of the wheelchair while disabling onboard control • Remote user maintains control of the wheelchair until released • Uses directional pad on remote for forward/backward/left/right • Safety • Ultrasonic sensors placed strategically to prevent collisions
Inside The PDF • All this plus… • Major Modules – Contents of each program file • Connections • Future Plans • Reported Problems