JOINT MECHANICS
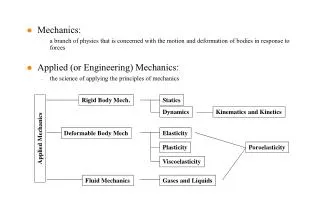
JOINT MECHANICS. Joint function is determined primarily by the shape and contour of the contact surfaces & the constraints of the surrounding soft tissue(s). There are 3 classifications of joints: FIBROUS CARTILAGINOUS SYNOVIAL. JOINT CLASSIFICATION.

JOINT MECHANICS
E N D
Presentation Transcript
JOINT MECHANICS Joint function is determined primarily by the shape and contour of the contact surfaces & the constraints of the surrounding soft tissue(s). • There are 3 classifications of joints: • FIBROUS • CARTILAGINOUS • SYNOVIAL
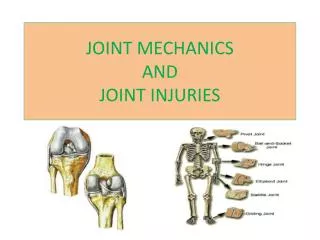
JOINT CLASSIFICATION FIBROUS joints are immoveable. e.g. cranial sutures. CARTILAGINOUS joints are slightly moveable. The bones are separated by cartilage and, at times, by ligaments e.g. intervetebral discs, pubic symphisis, sacroiliac joint SYNOVIAL joints are freely moveable. The joints consist of 2 bones in a cavity surrounded by a membrane that lubricates it with synovial fluid. -In synovial joints, the bones do NOT connect; there is articular cartilage at the ends to reduce friction as the bones move - Sometimes the joint cavity is divided by cartilaginous discs. e.g. meniscus in the knee. - Some synovial joints contain fluid-filled sacs called bursa between points of contact; these act as shock absorbers.
SYNOVIAL JOINT STABILITY Stability of the joint refers to its ability to resist unwanted action. Ex: In a hinge joint it resists abduction, adduction, rotation, and dislocation while allowing range of motion in flexion & extension. The planes of motion are determined in a joint by the skeletal articulations and the tensile forces of the ligaments, the tendons & muscles and the articulating capsule all provide some support.
TYPES OF SYNOVIAL JOINTS PIVOT joints have a ring of bone around a peg e.g. C1 of the vertebral column rotates around the ‘dens’ of C2 *allows rotation around one plane
TYPES OF SYNOVIAL JOINTS HINGE joints allow movement in only one plane: flexion and extension e.g.: the ankle, interphalangeal & elbow joints
TYPES OF SYNOVIAL JOINTS BALL & SOCKET joints are best seen in the hip and shoulder joint where movements go through all planes, including flexion, extension, abduction, adduction & rotation. e.g. Hip and shoulder *mvmt around 3 axes
TYPES OF SYNOVIAL JOINTS ELLIPSOIDAL is a reduced ball and socket in which significant rotation is largely excluded e.g. radiocarpal (wrist) joints & temporomandibular *allow mvmt in 2 planes
TYPES OF SYNOVIAL JOINTS SADDLE has 2 concave articulating surfaces permitting all motions except rotation e.g. carpo-metacarpal joint at the base of the thumb *allow mvmt in 2 planes
TYPES OF SYNOVIAL JOINTS GLIDING joints have flat articulating surfaces e.g. the facet joints of the vertebrae, the acromio-clavicular, intercarpal or intertarsaljoints
SHOULDER JOINT The shoulder, or glenohumeral joint,is an intricate and unstable joint.This instability gives it the huge range of motion needed for arm movements. The synovial ball & socket joint is made up of 2 bones – the scapula & humerus, and indirectly, the clavicle. The humeral head is held into the glenoid fossa with ligaments & the long head tendon of the biceps brachii.
MECHANICS OF MOVEMENT Skeletal muscles employ simple machines, such as levers, to increase efficiency of their contractile work about a joint. Mechanically, the degree of muscular effort needed to overcome resistance to movement at a joint (the fulcrum) depends on the force of that resistance (weight); the relative distances from the anatomical fulcrum to the anatomical sites of muscular effort (insertion); and the anatomical sites of resistance (joints) The position of the joint relative to the site of muscle pull (insertion) and the site of imposed load determines the class of lever system in use.
1st CLASS LEVER In a 1st class lever, the joint lies between the muscle and the load. The 1st class lever is the most efficient – it operates like a teeter totter. An example is flexing and extending the neck, the fulcrum is at the C1 and C2 joints, load is the weight of the head, and the effort is the muscular effort at the insertion on the occipital bone.
2nd CLASS LEVER In a 2nd class lever, the load lies between the joint and the effort (or pulling muscle). The 2nd class lever operates like a wheelbarrow. An example is standing on your toes with the fulcrum on the metatarsal heads at the metatarsophalangeal joints; load is the weight of the body, and the effort is the muscular effort at the insertion on the calcaneus.
3rd CLASS LEVER In a 3rd class lever, the muscle (effort) lies between the joint and the load. The 3rd class lever is less efficient for strength – it is built more for speed at the end of the lever. The most common lever in the human body is the 3rd class lever. An example is the biceps curl. Because the muscle has a poor mechanical advantage in this type of lever, it would be impossible to lift a bag of cement or your body weight with flexed arms.