Exploring Singularities of Rational Planar Curves Using Axial Moving Lines
This paper investigates the detection of singularities in rational planar curves through the use of axial moving lines and u-bases. By establishing a framework for identifying singular points and their corresponding moving lines, we aim to streamline the process of identifying geometric models in computational geometry. Our methodology highlights the relationship between singular points and moving lines of various orders, enhancing our understanding of these critical concepts in geometric modeling.

Exploring Singularities of Rational Planar Curves Using Axial Moving Lines
E N D
Presentation Transcript
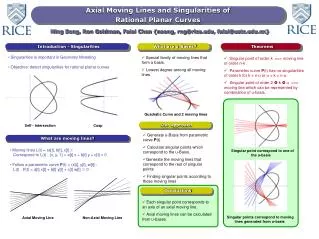
Axial Moving Lines and Singularities of Rational Planar Curves Ning Song, Ron Goldman, Falai Chen {nsong, rng@rice.edu, falai@ustc.edu.cn} Introduction - Singularities What are u-Bases? Theorems • Singularities is important in Geometry Modeling • Objective: detect singularities for rational planar curves • Special family of moving lines that form a basis. • Lowest degree among all moving lines • Singular point of order k <=> moving line of order n-k . • Parametric curve P(t) has no singularities of order k for k > n-u or u < k < n-u. • Singular point of order 2 k u <=> moving line which can be represented by combination of u-basis. Quadratic Curve and 2 moving lines Our approach Self - Intersection Cusp • Generate u-Basis from parametric curve P(t). • Calculate singular points which correspond to the u-Basis. • Generate the moving lines that correspond to the rest of singular points • Finding singular points according to those moving lines What are moving lines? • Moving lines L(t) = (a[t], b[t], c[t] ): • Correspond to L(t) . {x, y, 1} = a[t] x + b[t] y + c[t] = 0 • Follow a parametric curve P(t) = (x[t], y[t], w[t]): • L(t) . P(t) = a[t] x[t] + b[t] y[t] + c[t] w[t] 0 Singular point correspond to one of the u-basis Conclusions • Each singular point corresponds to an axis of an axial moving line. • Axial moving lines can be calculated from u-bases. Singular points correspond to moving lines generated from u-basis Axial Moving Line Non-Axial Moving Line