Download
1 / 29
310 likes | 833 Vues
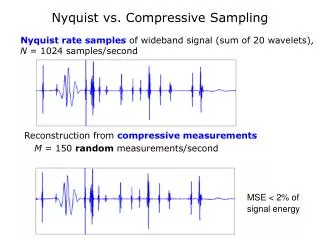
Sub-Nyquist Sampling and Identification of LTV Systems. Yonina Eldar Department of Electrical Engineering Technion – Israel Institute of Technology Electrical Engineering and Statistics at Stanford. http:// www.ee.technion.ac.il/people/YoninaEldar yonina@ee.technion.ac.il.

E N D
Sub-Nyquist Sampling and Identification of LTV Systems Yonina Eldar Department of Electrical Engineering Technion – Israel Institute of Technology Electrical Engineering and Statistics at Stanford http://www.ee.technion.ac.il/people/YoninaEldar yonina@ee.technion.ac.il Joint Work with Waheed Bajwa (Duke University) and Kfir Gedalyahu (Technion)
Summary Identify LTV systems from a single output using minimal resources exploiting the connection with sub-Nyquist sampling x(t) LTV system y(t)=H(x(t)) • Analog compressed sensing: Xampling • LTV system identification • Application to super-resolution radar • Real-world issues
Compressed Sensing • Explosion of interest in the idea of CS: Recover a vector x from a small number of measurements y=Ax • Many beautiful papers covering theory, algorithms, and applications
Analog Compressed Sensing Can we use these ideas to build new sub-Nyquist A/D converters? Prior work: Yu et. al., Ragheb et. al., Tropp et. al. Analog CS analog signal x(t) ? RF hardware need to recover analog input or specific data (demodulation) Standard CS vector x few nonzero values random/det. matrix convex optimization greedy methods Input Sparsity Measurement Recovery
Sampling/Compressed Sensing • One approach to treating continuous-time signals within the CS framework is via discretization • Thomas and Ali discussed at length this morning in thier beautiful talks! • Alternative: Use more standard sampling techniques to convert the signal from analog to digital and then rely on CS methods in the digital domain (Xampling = CS + Sampling) • Possible benefits: Simple hardware, compatibility with existing methods, smaller size digital problems • Possible drawbacks: SNR sensitivities • Can we tie the two worlds together?
Signal Models (Mishali and Eldar, 08-10) Unknown delays • Applications: multipath communication channels, • ultrawideband, radar, bio-imaging (ultrasound) …. • More general abstract frameworks – Union of subspaces Unknown pulse shape Unknown carriers degrees of freedom per time unit
Streams of Pulses degrees of freedom per time unit • Special case of Finite Rate of Innovation (FRI) signals (Vetterli , Marziliano& Blu) • Minimal sampling rate – the rate of innovation: • Previous work: • The rate of innovation is not achieved • Pulse shape often limited to diracs • Unstable for high model orders (Dragotti, Vetterli & Blu) (Kusuma & Goyal, Seelamantula & Unser) • Alternative approach based on discretization and CS (Herman and Strohmer)
Sampling Stage: Stream of Pulses (Gedalyahu and Eldar 09-10) Serial-to-Parallel • The analog sampling filter “smoothes” the input signal : • Allows sampling of short-length pulses at low rate • CS interpretation: each sample is a linear combination of the signal’s values. • The digital correction filter-bank: • Removes the pulse and sampling kernel effects • Samples at its output satisfy: • The delays can be recovered using ESPRIT as long as
What Happens When There is Noise? • If the transmitted pulse is “flat” then effectively after sampling we obtain • Can use known methods for ESPRIT with noise • In our case an advantage is that we can accumulate several values of n so as to increase robustness • Systematic study of noise effects: work in progress (Ben-Haim, Michaeli, Eldar 10) • Develop Cramer-Rao bounds under no assumptions on the delays and amplitudes for a given rate independent of sampling method • Examine various methods in light of the bound
Robustness in the Presence of Noise • Proposed scheme: • Mix & integrate • Take linear combinations • from which Fourier coeff. • can be obtained Fourier coeff. vector Samples Gedalyahu, Tur & Eldar (2010) • Supports general pulse shapes (time limited) • Operates at the rate of innovation • Stable in the presence of noise – achieves the Cramer-Rao bound • Practical implementation based on the MWC
Xampling: Sub-Nyquist Sampling (Mishali and Eldar, 08-10) • Sub-Nyquist sampler in hardware • Combines analog preprocessing with digital post processing • Supporting theory proves the concept and robustness for a variety of applications including multiband signals • Allows time delay recovery from low-rate samples (Gedalyahu and Eldar 09-10) • Applications to ultrasound (Tur and Eldar 09)
Online Demonstrations • GUI package of the MWC • Video recording of sub-Nyquist sampling + carrier recovery in lab
Degrees of Freedom • Low rate sampling means the signal can be represented using fewer degrees of freedom • The Xampling framework implies that many analog signals have fewer DOF than previously assumed by Nyquist-rate sampling • Can these ideas be exploited to characterize fundamental limits in other areas? • Today: Applications to linear time-varying (LTV) system identification Sub-Nyquist sampling of pulse streams can be used to identify LTV systems using low time-bandwidth product
Outline Identify LTV systems from a single output using minimal resources x(t) LTV system y(t)=H(x(t)) • Previous results • Channel model: Structured LTV channel • Algorithm for system identification • Application to super-resolution radar
LTV Systems • Many physical systems can be described as linear and time-varying • Identifying LTV systems can be of great importance in applications: • Improving BER in communications • Integral part of system operation (radar or sonar) Examples: • Multipath identification LTV system K targets LTV channel propagation paths Probing signal pulses per period Received signal
LTV Systems • Any LTV system can be written as (Kailath 62, Bello 63) delay-Doppler spreading function • Assumption: • Underspread systems • (more generally the footprint in the delay-Doppler space has area less than 1) • Typical in communications (Hashemi 93):
Theorem (Kailath 62, Bello 63, Kozek and Pfander 05): System Identification • Probe the system with a known input x(t) LTV system y(t)=H(x(t)) • Identify thesystem from H(x(t)) i.e. recover the spreading function • Difficulties: • Proposed algorithms require inputs with infinite bandwidth W and • infinite time support T • W – System resources, T – Time to identify targets Can we identify a class of LTV systems with finite WT?
Structured LTV Systems • Problem: minimize WT and provide concrete recovery method • Solution: Add structure to the problem Finite number of delays and Dopplers: • Examples: • Multipath fading: finite number of paths between Tx and Rx • Target identification in radar and sonar: Finite number of targets Goal: Minimize WT for identifying
Theorem (Bajwa, Gedalyahu and Eldar 10): Main Identification Result • Probing pulse: WT is proportional only to the number of unknowns!
Implications • Without noise: Infinite resolution with finite resources • Performance degrades gracefully in the presence of noise up to a threshold • Low bandwidth allows for recovery from low-rate samples • Low time allows quick identification • Efficient hardware implementation and simple recovery • Application: • Super-resolution radar from low-rate samples and fast varying targets
Super-resolution Radar • Main tasks in radar target detection: • Disambiguate between multiple targets, even if they have similar velocities and range (super-resolution) • Identify targets using small bandwidth waveforms: helps • in interference avoidance and sampling (bandwidth) • Identify targets in small amount of time (time) • Matched-filtering based detection: Resolution is limited by time and bandwidth of the radar waveform (Woodward’s ambiguity function) • CS radar (Herman and Strohmer 09): assumes discretized grid • Proposed Method: No grid assumptions and characterization of the relationship between WT and number of targets
Super-resolution Radar • Setup • Nine targets • Max. delay = 10 micro secs • Max. Doppler = 10 kHz • W = 1.2 MHz • T = 0.48 milli secs • N = 48 pulses in x(t) • Sequence = random binary
Behavior With Noise • Setup: Estimation of nine delay-Doppler pairs (targets) • Time-Bandwidth Product = 5 times oversampling of the noiseless limit • Observations • Performance degrades gracefully in the presence of noise • Doppler estimation has higher MSE due to two-step recovery
Main Tools • The results and recovery method rely on sub-Nyquist methods for • streams of pulses (Gedalyahu and Eldar 09): • Such signals can be recovered from the output of a LPF with • Allows to reduce the bandwidth W of the probing signal • The doppler shifts can be recovered from using DOA methods by exploiting the structure of the probing signal: reduces time Combining sub-Nyquist sampling with DOA methods leads to identifiability results and recovery techniques
Conclusion • Parametric LTV systems can be identified using finite WT • Concrete polynomial time recovery method • Uses ideas from sub-Nyquist sampling: Efficient hardware • Super-resolution radar: no restrictions on delays and Dopplers when the noise is not too high Sub-Nyquist methods have the potential to lead to interesting results in related areas More details in: W. U. Bajwa, K. Gedalyahu and Y. C. Eldar, "Identification of Parametric Underspread Linear Systems and Super-Resolution Radar,“ to appear in IEEE Trans. Sig. Proc.
~ ~ ~ ~ Next Step • Can we combine analog sampling methods with CS on the digital side to improve robustness? • Can be done e.g. in the multiband problem • Extend to radar problem
References • M. Mishali and Y. C. Eldar, “Blind multiband signal reconstruction: Compressed sensing for analog signals,” IEEE Trans. Signal Processing, vol. 57, pp. 993–1009, Mar. 2009. • M. Mishali and Y. C. Eldar, “From theory to practice: sub-Nyquist sampling of sparse wideband analog signals,” IEEE Journal of Selected Topics on Signal Processing, vol. 4, pp. 375-391, April 2010. • M. Mishali, Y. C. Eldar, O. Dounaevsky and E. Shoshan, " Xampling: Analog to Digital at Sub-Nyquist Rates," to appear in IET. • K. Gedalyahu and Y. C. Eldar, "Time-Delay Estimation From Low-Rate Samples: A Union of Subspaces Approach," IEEE Trans. Signal Processing, vol. 58, no. 6, pp. 3017–3031, June 2010. • R. Tur, Y. C. Eldar and Z. Friedman, "Low Rate Sampling of Pulse Streams with Application to Ultrasound Imaging," to appear in IEEE Trans. on Signal Processing. • K. Gedalyahu, R. Tur and Y. C. Eldar, "Multichannel Sampling of Pulse Streams at the Rate of Innovation," to appear in IEEE Trans. on Signal Processing.