Advanced Techniques in 4D Variational Data Assimilation Observation Operators
330 likes | 347 Vues
Explore 4DVAR algorithms, strong and weak constraints, IS4DVAR procedures, and observation NetCDF files for detailed data assimilation analysis in ocean modeling.

Advanced Techniques in 4D Variational Data Assimilation Observation Operators
E N D
Presentation Transcript
4D Variational Data Assimilation Observation Operators 4D Variational Data Assimilation Observation Operators Hernan G. Arango
ROMS 4DVAR ALGORITHMS • Strong Constraint • Conventional (S4DVAR): outer loop,NLM,ADM • Incremental (IS4DVAR): inner and outer loops,NLM,TLM,ADM(Courtier et al., 1994) • IS4DVAR_OLD: inefficient old conjugate gradient algorithm (is4dvar_ocean_old.h, descent.F) • IS4DVAR: new conjugate gradient algorithm, CONGRAD, Fisher 1997 (is4dvar_ocean.h, cgradient.h) • IS4DVAR, LANCZOS: conjugate gradient and Lanczos algorithm, Fisher 1997 (is4dvar_ocean_lanczos.h, cgradient_lanczos.h) • Weak Constraint • Indirect Representer Method (W4DVAR): inner andouter loops,NLM,TLM,RPM,ADM (Egbert et al., 1994; Bennett et al, 1997) • Physical Space Statistical Analysis (W4DPSAS):inner and outer loops,NLM,TLM,ADM (Courtier, 1997)
xk = B-1/2(xk + xk-1 – xb) xk = B1/2vk + xk-1 – xb Strong Constraint, Incremental 4DVAR Let’s introduce a new minimization variablev, such that: yielding J(vk) = ½(vk)Tvk + ½(Hxk – dk-1)TO-1(Hxk – dk-1) The gradient ofJin minimization-space, denotedv J, is given by: v J = vk + BT/2HTO-1(Hxk – dk-1) = vk + BT/2x Jo=>vk + W-1/2LT/2GS The background-error covariance matrix can be factored as: B = SCS => S(GL1/2W-1/2)(W-1/2LT/2G)S whereSis the background-error standard deviations,Cis thebackground-error correlations which can be factorized asC = C1/2CT/2,Gis the normalization matrix which ensures that the diagonalelements ofCare equal to unity,Lis a 3D self-adjoint filteringoperator, andWis the grid cell area or volume.
Basic IS4DVAR Procedure • Choose an x(0) = xb(0) • Integrate NLROMS t [0, ] and save x(t) (NLM at OBS) (a) Choose a x(0) (b) Integrate TLROMS t [0, ] and compute J (TLM at OBS) (c) Integrate ADROMS t [0, ] to yield (ADM forcing at OBS) (d) Compute (e) Use a descent algorithm to determine a “down gradient” correction to x(0) that will yield a smaller value of J (f) Back to (b) until converged (3) Compute new x(0) = x(0) + x(0) and back to (2) until converged Outer Loop Inner Loop
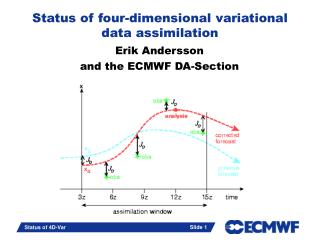
Incremental, Strong Constraint 4DVar (IS4DVAR) • Given a first guess (a forward trajectory)… • And given the available data…
Incremental, Strong Constraint 4DVar (IS4DVAR) • Given a first guess (a forward trajectory)… • And given the available data… • IS4DVAR computes the changes (or increments) to the initial conditions so that the forward model fits the observations.
4DVAR Observations NetCDF File • Utility/obs_initial.F • Utility/obs_read.F • Utility/obs_write.F • Utility/obs_scale.F • Utility/obs_depth.F • Utility/extract_obs.F • Adjoint/ad_extract_obs.F • Adjoint/ad_misfit.F
Metadata Dimensions: survey Number of different time weight Number of interpolation weight datum Observations counter, unlimited dimension Variables: Nobs(survey) Number of observations per time survey survey_time(survey) Survey time (days) obs_type(datum) State variable ID associated with observation obs_time(datum) Time of observation (days) obs_lon(datum) Longitude of observation (degrees_east) obs_lat(datum) Latitude of observation (degrees_north) obs_depth(datum) Depth of observation (meters or level) obs_Xgrid(datum) X-grid observation location (nondimensional) obs_Ygrid(datum) Y-grid observation location (nondimensional) obs_Zgrid(datum) Z-grid observation location (nondimensional) obs_error(datum) Observation error, assigned weight obs_value(datum) Observation value
Observations NetCDF 8 7 5 6 4 3 1 2 (i2,j2,k2) (i1,j1,k1) dimensions: survey= 1 ; tate_variable= 7 ; datum = UNLIMITED ; // (79416 currently) variables: charspherical; spherical:long_name = "grid type logical switch" ; intNobs(survey) ; Nobs:long_name = "number of observations with the same survey time" ; doublesurvey_time(survey) ; survey_time:long_name = "survey time" ; survey_time:units = "days since 2000-01-01 00:00:00" ; survey_time:calendar = "365.25 days in every year" ; doubleobs_variance(state_variable) ; obs_variance:long_name = "global (time and space) observation variance" ; obs_variance:units = "squared state variable units" ; intobs_type(datum) ; obs_type:long_name = "model state variable associated with observation" ; obs_type:units = "nondimensional" ; doubleobs_time(datum) ; obs_time:long_name = "time of observation" ; obs_time:units = "days since 2000-01-01 00:00:00" ; obs_time:calendar = "365.25 days in every year" ; doubleobs_depth(datum) ; obs_depth:long_name = "depth of observation" ; obs_depth:units = "meter" ; doubleobs_Xgrid(datum) ; obs_Xgrid:long_name = "x-grid observation location" ; obs_Xgrid:units = "nondimensional" ; doubleobs_Ygrid(datum) ; obs_Ygrid:long_name = "y-grid observation location" ; obs_Ygrid:units = "nondimensional" ; doubleobs_Zgrid(datum) ; obs_Zgrid:long_name = "z-grid observation location" ; obs_Zgrid:units = "nondimensional" ; doubleobs_error(datum) ; obs_error:long_name = "observation error, assigned weight, inverse variance" ; obs_error:units = "inverse squared state variable units" ; doubleobs_value(datum) ; obs_value:long_name = "observation value" ; obs_value:units = "state variable units" ;
Processing • Use hindices, try_range and inside routines to transform (lon,lat) to (,) • Find how many survey times occur within the data set (survey dimension) • Count observations available per survey (Nobs) and assign their times (survey_time) • Sort the observation in ascending time order and observation time for efficiency • Save a copy of the observation file • Several matlab scripts to process observations
ROMS GRID • Horizontal curvilinear orthogonal coordinates on an Arakawa C-grid • Terrain-following coordinates on a staggered vertical grid
Vieste (Italy) Dubrovnik (Croatia) Longitude Vertical Terrain-following Coordinates Depth (m)
PARALLEL TILE PARTITIONS 8 x 8 Ny } } Nx
East-West MPI Communications Nonlinear With Respect To Tile R With Respect To Tile R Adjoint
North-South MPI Communications With Respect to Tile B Nonlinear Adjoint
Longterm Ecosystem Observatory New Jersey Shelf Observing System 30km x 30km 1998-2001 Satellites, Aircraft, Surface RADAR, Glider AUVs 300km x 300km Beginning 2001 LEO-15 LEO NJSOS THE STATE UNIVERSITY OF NEW JERSEY RUTGERS Station Field 3km x 3km 1996-Present
Assumptions • All scalar observations are assumed to be at RHO-points. • All vector observations are assumed to be rotated to curvilinear grid, if applicable. Vector observations are always measured at the same location. • All observation horizontal locations are assumed to be in fractional curvilinear grid coordinates. • Vertical locations can be in fractional levels (1:N) or actual depths (negative values). • Removal of tidal signal? • Filtering of non-resolved processes?
Observation Operators • Currently, all observations must be in terms of model state variables (same units): • 2D configuration: zeta, ubar, vbar • 3D configuration: zeta, u, v, T, S, … • There is not a time interpolation of model solution at observation times: time - 0.5*dt < ObsTime < time + 0.5*dt • There is not observations quality control (screening) inside ROMS, except ObsScale. • No observation constraints are implemented (Satellite SST measurements)
Observation Interpolation • Only spatial linear interpolation is coded. • If land/sea masking, the interpolation coefficients are weighted by the mask. • If shallower than z_r(:,:,N), observations are assigned to the surface level. • If deeper than z_r(:,:,1), observations are assigned to bottom level.
Recommedations • Create a NetCDF file for each observation type. • Use a processing program to meld NetCDF observation files (nc_4dvar_meld.m). • Keep a master copy of each observation file, in case that you are running your application at different resolutions. • Decimation of observations. Finite volume representation?
BACKGOUND ERROR COVARIANCE
Model/Background Error Covariance, B • Use a generalized diffusion squared-root operator (symmetric) as in Weaver et al. (2003): B = S C S = S (G L1/2 W-1/2) (W-1/2 LT/2 G) • The normalization matrix,G, ensure that the diagonalelements of the correlation matrix,C, are equal to unity.They are computed using theexact(expensive) orrandomization(cheaper) methods. • The spatial convolution of the self-adjoint filtering operator,L1/2, is split in horizontal and vertical components anddiscretized bothexplicitlyand implicitly. • The model/background standard deviation matrix,S, iscomputed from long (monthly, seasonal) simulations. • The grid cell area or volume matrix,W-1/2, is assumed to betime invariant.
Horizontal Vertical (implicit) Vdecay = 100 m Hdecay = 100 km Model/Background Error Correlation (C)
SSH Temperature EAC EAC Bottom Level Model/Background Error Correlation Normalization Coefficients (G)