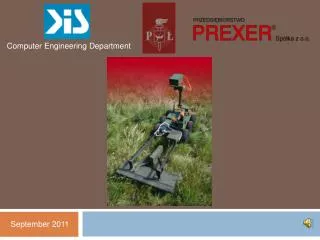
Mobile Robot for Surveillance and Mine Detection Tasks
In September 2011, the Computer Engineering Department at the Technical University of Lodz introduced a mobile robot designed for surveillance and mine detection tasks. This innovative robot incorporates advanced systems, including vision, sensing, and control mechanisms, enabling it to navigate complex environments autonomously. Equipped with various sensors such as laser scanners, GPS, and cameras, it can detect obstacles, track movement, and build maps while adhering to military endurance standards. This project emphasizes the utilization of robotics in enhancing safety and operational efficiency in critical fields.

Mobile Robot for Surveillance and Mine Detection Tasks
E N D
Presentation Transcript
Computer Engineering Department September 2011
Nowadays robots take a significant partin almost all fields of life of mankind.
Everywhere where precision, repetitiveness or endurance are required robots support people in realization of their purposes.
A special group of machines are robots dedicated to military purposes. One of their unique function is an ability to make decisions on the battlefield.
TECHNICAL UNIVERSITY OF LODZ Computer Engineering Department MOBILE ROBOT FOR SURVEILLANCE AND MINE DETECTION TASKS September 2011 Project chairman: prof. Dominik Sankowski
Constructors • Computer Engineering Department Technical University of Lodz • Prexer Computer Engineering Department
Scientific team prof. Dominik Sankowski Stanisław Kwiatkowski Marcin Bartłomiejczyk Marcin Bąkała Sylwester Błaszczyk Wojciech Dadan Piotr Duch Rafał Jachowicz Sławomir Jeżewski Roman Krzeszewski Maciej Łaski Zbigniew Stolarski Adam Śmigielski Adam Wulkiewicz
Mobile Robot systems • Vision system • Sensor system(laser scanner, GPS itp.) • Control system • Metal objects detection system
Vision system – cameras Daylight camera Noctovision camera Thermovision camera
Picture in Picture system • Multiple source image analysis and merging • EDMA system usage • Real-time execution
Image auto-focus algorithm • Real-time execution • Precise lens position control • Continuous auto-focusing
Operator mobile console • Intuitive user interface • Military endurance standards tests • Multiple choice of semi-automatic commands
Mobile robot sensors • Hokuyo – laser scanner • Sharp – infrared distance sensor • Senix – ultrasonic sensor • xSens - gyroscope, accelerometer, compass • ublox - GPS
Mobile robot sensors - placement Gyroscope, acceletormeter, compass GPS Laser scanner
Map of the environment • Occupancy grid – areas on the grid indicates probabilities of obstacle presence in the robot environment • Simultaneous localization and map building • Data from the laser scanner are sufficient for map building
Trajectory definition • Trajectory is calculated to avoid obstacles present in the environment of the robot • A* algorithm optimalized implementation for DSP processors
Mobile robot movement detection • Infrared distance sensors usage • Object detection in the ambience of the robot algorithm • Signal processors usage • Real-time execution S1_data[N] S2_data[N] i - pozycja dx [ mm] Następny pomiar
Control system • Layer 1: drive system – processors and software for low-level programming control of robot’s wheels and arm systems • Layer 2: Sensor system – processors and software dedicated to sensor devices support • Layer 3: Sensor data integration – processors and software dedicated to analysis and integration of the data received from the sensor system • Layer 4: Image acquisition – devices for image acquisition and preprocessing. Should be isolated from the sensor system due to high resources consuming requirements • Layer 5: Environment reconstruction – microprocessor system dedicated to analysis and integration of the integrated sensor data and the image data • Layer 6: Navigation system – software dedicated to trajectory calculation • Layer 7: Communication system – processors and software dedicated to communication between the robot and the operator
Metal object detection system • Light, kevlar construction • Automatic calibration according to surface structure • Large detection range • Light detection signalization