DINAMIKA
DINAMIKA. Dinamički sistem - pogon sa motorom jednosmerne struje: N:. U opštem slučaju ovaj dinamički sistem je NELINEARAN. MATEMATI ČKI MODEL POGONA SA NEZAVISNO POBUĐENOM JEDNOSMEROM MAŠINOM. Ponavljanje gradiva. A:. BLOK DIJAGRAM MATEMATIČKOG MODELA POGONA. N:. Njutnova jednačina.

DINAMIKA
E N D
Presentation Transcript
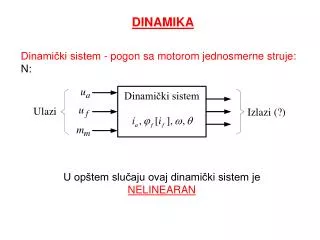
DINAMIKA Dinamički sistem - pogon sa motorom jednosmerne struje: N: U opštem slučaju ovaj dinamički sistem je NELINEARAN
MATEMATIČKI MODEL POGONA SA NEZAVISNO POBUĐENOM JEDNOSMEROM MAŠINOM Ponavljanje gradiva. A:
BLOK DIJAGRAM MATEMATIČKOG MODELA POGONA N: Njutnova jednačina Jednačina indukta Jednačina pobude (Prva varijanta)
BLOK DIJAGRAM MATEMATIČKOG MODELA POGONA Njutnova jednačina N: Jednačina indukta Jednačina pobude (Druga varijanta)
LINEARANSLUČAJ Ovaj uslov eliminiše jednačinu pobudnog kola. U prostoru stanja model pogona - dinamičkog sistema je:
Blok dijagram u operatorskom domenu: N: Njutnova jednačina Jednačina indukta
LINEARIZOVANISLUČAJ Matematički model nelinearnog dinamičkog sistema može se linearizovati u radnoj tački, odnosno u okolini radne tačke, stacionarnog stanja. Na osnovu poznavanja vrednosti vektora ulaza: u posmatranom režimu i jednačina stacionarnog stanja može se odrediti odgovarajuća vrednost vektora stanja: Dinamički sistem pogona sa nezavisno pobuđenim jednosmernim motorom, sad je:
Koordinate vektora stanja u posmatranom režimu, odnosno za određene vrednosti vektora ulaza dobijaju se rešavanjem jednačina ustaljenog stanja: N: po Četvrta jednačina iz koje sledi 0=0,je izostavljena jer nas ograničava na samo jedan specijalan slučaj.
Odgovarajući linearizovani matematički model nezavisno pobuđenog jednosmernog motora u prostoru stanja je: N:
Ako za promenljivu stanja umesto Δf uzmemo Δifmatematički model u prostoru stanja je: N: gde je:
Blok dijagram u operatorskom domenu ako je jedna od promenljivih stanja Δf: N:
Blok dijagram u operatorskom domenu kada je promenljiva stanja Δif umesto Δf. N:
VEKTOR IZLAZA Kod dinamičkih sistema kao što su elektromotorni pogoni, ulazi se obično ne prosleđuju direktno na izlaz, pa je: Za Ako je: – jedinična matrica Na sličan način može se odrediti matrica C i za druge slučajeve.
ANALIZA DINAMIČKIH REŽIMA • Metode: • Funkcije prenosa; • Polovi i sopstvene vrednosti; • Modelovanje. • Primenu navedenih metoda razmotrićemo na najjednostavnijem primeru u kome je posmatrani dinamički sistem LINEARAN. Nećemo uzimati u razmatranje treću promenljivu stanja.
FUNKCIJE PRENOSA Operatorski domen. Blok dijagram koji odgovara ovom slučaju je: Ulazi u sistem: ua i mm. Izlazi iz sistema, npr.: iia.
Druga varijanta blok dijagrama, gde je jednom prenosnom funkcijom zamenjena jednačina indukta: Ulazi u sistem: ua i mm. Izlazi iz sistema, npr.: iia.
Funkcije prenosa koje se dobijaju poznatim metodama, pomoću blok dijagrama:
PROSTORSTANJA U prostoru stanja sistem jednačina je: - vektor stanja A - matrica sistema - vektor ulaza B - matrica ulaza
Ako se usvoje isti izlazi kao u prethodnom slučaju, onda je: - vektor stanja C - matrica izlaza - vektor ulaza
Zamenjujući: Može se izvesti: H(p)- Matrica prenosa.
POLOVI I SOPSTVENE VREDNOSTI Rešavanjem karakteristične jednačine dobijaju se polovi posmatranog dinamičkog sistema – pogona sa nezavisno pobuđenim motorom jednosmerne struje. N: Sopstvene vrednosti sistema dobijaju se rešavanjem jednačine:
Karakteristična jednačina: N: Rešenja karakteristične jednačine su:
Uticaj fluksa na raspored polova - sopstvenih vrednosti. f max = f nom Im N: f = 0,9f nom f = 0 0 = f fkr -Re f min> 0 f min> 0 f max = f nom
Vrednost fluksa pri kojoj se polovi izjednačavaju, odnosno postaju konjugovano-kompleksni brojevi. Za Za
Uticaj mom. inercije (Tm) na raspored polova – sopst. vrednosti Tm min N: Im Tm nom Tmkr 2Tm nom Tm Tm -Re Tm max Tm max Tm min
Vrednost mehaničke vremenske konstante pri kojoj dolazi do promene prirode polova Za Za
Uticaj dod. otpora (Rad) na raspored polova – sopst. vrednosti Karakteristična jednačina može se napisati: A: gde je: Polovi (sopstvene vrednosti) su:
Im Ra+Rad =0 Rad=0 Rad kr -Re Rad max Rad max Rad =Ra Rad =Ra Rad p2 0 Rad p1 - Ra+Rad =0 Rad=0 Ne sme se zaboraviti da je minRa + Rad = Ra!!!!
PROCENA PONAŠANJA POGONA U TRANZIJENTNIM STANJIMA POMOĆU FUNKCIJA PRENOSA Potrebno je odrediti: y(t) za odgovarajuće u(t) Egzaktna zavisnost dobija se inverznom Laplasovom transformacijom: Za inženjerske potrebe dovoljno je napraviti procenu na osnovu poznavanja: -polova ( sopstvenih vrednosti ); -vrednosti y(0) i -vrednosti y ().
Karakteristični ulazi: - " step " - " impuls "
Odziv brzine motora na promenu napona indukta po "step" funkciji (ua) Tm1 > Tmkr Tm2 < Tmkr
Odziv brzine motora na impulsnu promenu napona indukta (ua) Tm1 > Tmkr Tm2 < Tmkr
Odziv brzine motora na promenu momenta opterećenja po "step" funkciji (mm) Tm1 > Tmkr Tm2 < Tmkr
Odziv brzine motora na impulsnu promenu momenta opterećenja (mm) Tm1 > Tmkr Tm2 < Tmkr
Odziv brzine motora na impulsnu promenu momenta opterećenja (impuls duže traje u odnosu na prethodni slučaj) (mm) Tm1 > Tmkr Tm2 < Tmkr
MODELOVANJE • Digitalni računari i softverski paketi. • Mogućnosti: • analiza nelinearnih sistema; • analiza stanja kod više istovremenih poremećaja; • interaktivan rad sa modelom; • istovremeno posmatranje više izlaza, ili karakterističnih veličina; • utvrđivanje parametara sistema na osnovu poznavanja ulaza i izlaza itd.
BLOK DIJAGRAM MODELA POGONA SA NEZAVISNO POBUĐENIM JEDNOSMERNIM MOTOROM N:
Izgled bloka “jednosmerni motor” u razvijenom obliku sa prethodne slike
Slika 1: Start pogona u praznom hodu Struja polaska je ograničena dodatim otporom. Prelazni proces je aperiodičan.
Slika 2: Start pogona u praznom hodu Struja polaska ograničena kao na slici 1 Prelazni proces periodično - prigušen
Slika 3: Start pogona pod opterećenjem Struja polaska ograničena kao na slici 1 Prelazni proces aperiodičan
Slika 4: Start pogona pod opterećenjem Struja polaska ograničena kao na slici 1 Prelazni proces periodično - prigušen
Slika 5: Opterećenje i potpuno rasterećenje rasterećenje opterećenje Prelazni procesi su periodični sa jakim prigušenjem
Slika 6: Prelazak iz motornog u generatorski režim generatorski režim, rekuperacija
Slika 7: Rekuperacija usled snižavanja napona indukta Moment opterećenja konstantan napon smanjen za 20% napon smanjen za 20% rekuperacija
Slika 8: Protivstrujno kočenje na prvi način Moment opterećenja je potencijalan i konstantan početak kočenja dodati otpor ima vrednost koja dovodi do reversa revers