Download
1 / 46
500 likes | 829 Vues
Physiologie de la locomotion Rôle des différents muscles. Dr Arnaud DELVAL. Plan du cours. Contrôle de l ’ activité musculaire lors du mouvement Maintien de la Posture, ajustements posturaux anticipés et programmation posturale Processus biomécanique de la locomotion. Fonction des muscles.

E N D
Physiologie de la locomotion Rôle des différents muscles Dr Arnaud DELVAL
Plan du cours • Contrôle de l’activité musculaire lors du mouvement • Maintien de la Posture, ajustements posturaux anticipés et programmation posturale • Processus biomécanique de la locomotion
Fonction des muscles • Production d’un mouvement • Maintien de la posture, de la position • Stabilité des articulations • Autres : protection des viscères, contrôle des pressions dans une cavité, température corporelle, déglutition, contrôle vésical, sphinctérien…
Rôle des muscles • Prime Mover : moteur principal, délivre le mouvement • Si nécessité de plus de forces, « assistant movers », muscles d’assistance
Agonistes et antagonistes • Muscles créant le même mouvement d’une articulation : agonistes • Muscle s’opposant ou provoquant le mouvement inverse : antagonistes • Dans un mvt, soit relaxation de l’antagoniste pour permettre le mouvement, soit co-contraction pour permettre le contrôle du mouvement ou le ralentir
Muscles stabilisateurs et neutralisant • Stabilisateur : m. qui, par sa contraction statique, fixe le segment osseux, ou la partie du corps au point d’origine de la contraction musculaire afin que le m. moteur principal ait un appui stable pour exercer l’action souhaitée. Ex moyen fessier au moment de l’appui du pied. • Neutralisant : m. qui contrecarre ou neutralise une action indésirable provoquée par le m. moteur principal. Ex du grand fessier qui permet l’extension de la cuisse mais qui provoque aussi une rotation externe : nécessité d’une contraction du petit fessier et du tenseur du fascia lata
Abduction du bras : deltoïde : m. moteur principal et agoniste, gd dorsal : antagoniste car résiste à l’abduction du bras. Le trapèze joue un rôle stabilisateur. Le petit rond empêche la rotation interne induite par le gd dorsal
TYPES DE CONTRACTION MUSCULAIRE • Régime concentrique (anisométrique) : forme courante de la contraction qui se manifeste par un raccourcissement. Force > poids • Régime isométrique : la force développée est égale au poids • Régime excentrique (anisométrique) : lorsque la charge à déplacer est supérieure à la force déployée : freinage lent
Performance, paramètres de la tâche • Paramètres de la tâche : amplitude du mouvement désiré, vitesse (lente, rapide), charge externe, précautions, autres paramètres données dans les instructions (ne corrigez pas votre position finale si vs ratez votre cible…) • Paramètres du mouvement : • Cinématique : position de l’articulation, vitesse, accélération • Cinétique : moment de l’articulation, puissance… • EMG…etc
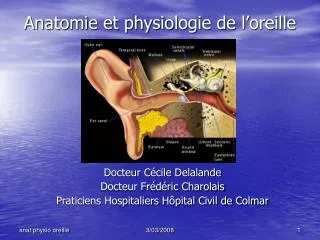
POSTURE • La posture apparaît comme une activité de positionnement du corps, préparant à l’action, la soutenant dans son cours et assurant l’efficacité de son exécution • Chez l’homme, la posture de référence, la station debout, est essentiellement construite à l’encontre de la pesanteur sur les différents segments corporels • Le tonus postural s'observe principalement dans les muscles extenseurs des membres, au niveau des muscles du tronc, du cou, du masséter. C'est par son intermédiaire que se détermine la posture la plus habituelle, la station debout • Les réflexes posturaux ont pour finalité de maintenir la posture de référence ou de l'adapter à l'environnement
Coordination entre posture et mouvement • Au cours de la plupart des actes moteurs, il est nécessaire de déplacer certains segments pour effectuer un mouvement et de stabiliser en même temps la position ou l'orientation d'autres segments, comme la tête ou le tronc, qui servent de valeur de référence pour le calcul de la position de la cible à atteindre ou pour celui de la trajectoire • Il est aussi impératif de maintenir l'équilibre. Or, le mouvement lui-même est une source de perturbation de la posture et de l'équilibre • Le mouvement modifie la projection au sol du centre de gravité, ce qui est source de déséquilibre.
Coordination entre posture et mouvement • Pour compenser l'effet perturbateur du mouvement, le cerveau peut utiliser deux moyens : • Il peut corriger la perturbation par un ajustement postural réactionnel, qui a l'inconvénient de survenir avec un certain délai et de ne pouvoir annuler entièrement l'effet perturbateur • Il peut aussi provoquer au travers de réseaux nerveux adaptatifs l'apparition d'ajustements posturaux anticipés qui surviennent avant le début de la perturbation et qui ont pour effet de minimiser son effet
Un exemple d’APAs : l’initiation de la marche • Tout mouvement effectué en position debout nécessite d’être précédé d’ajustements posturaux anticipés afin de préserver l’équilibre • L’anticipation de la phase d’initiation de la marche est la courte période entre le passage d’une posture dite « de repos » à une posture d’aptitude au démarrage • Des actions musculaires synergiques complexes à l’origine de forces de propulsion sont nécessaires à la création d’un couple mécanique, essentiellement au niveau des hanches et des chevilles
Cette phase d’anticipation est préprogrammée et nécessite notamment l’inhibition bilatérale des muscles soleus, extenseurs du pied et l’activation synchrone des 2 tibialis anterior, releveurs, afin de créer un couple de déséquilibre
Rôles des APAs • Les APAs ont donc un double rôle : • Préparation posturale à la perturbation : correction de l’effet de la perturbation • Les APA peuvent également être considérés comme partie intégrante du mouvement, préparant non seulement la posture au mouvement, mais aussi l’assistant en termes de force ou de vitesse (notion de capacité posturo-cinétique)
Un exemple de mouvement « automatique » : la marche • Cycle de locomotion : compris entre 2 appuis du pied sur le sol • Phase d’appui ou « stance phase » dès que le pied touche le sol: phase propulsive du cycle, mettant en jeu les muscles extenseurs. D’abord extension régulière de la hanche permettant le passage du corps en avant du pied avec de manière concomitante une flexion du genou et de la cheville. Ensuite, toutes les articulations s’étendent : phase propulsive proprement dite. • Phase d’oscillation ou « swing phase » : m. fléchisseurs permettant le lever (flexion hanche, genou et cheville) puis fl hanche et extension genoux et cheville
Locomotion • Phase d’appui plus longue que la phase d’oscillation : 60 % vs 40 % • L’activité des extenseurs (phase d’appui) est proportionnelle à la durée de cycle, l’activité des fléchisseurs (phase oscillation) restant par contre assez constante.
Paramètres étudiés • Cycle de marche : période qui va du contact initial du talon jusqu’au prochain contact du même talon sur le sol • Longueur du cycle ou longueur du double-pas (stride length) : distance qui sépare un point donné du même pied entre 2 appuis successifs (m) • Durée de cycle (stride time) : intervalle de temps au cours duquel un des membres inférieurs réalise successivement une phase d’appui et une phase d’oscillation (s) • Cadence : nombre de pas par minute • Vitesse moyenne de progression : produit de la cadence par la longueur de pas divisé par 60 (m/s)
Paramètres étudiés • Simple appui, double appui : Au moment précis du contact du talon avec le sol, le marcheur se trouve dans une situation de double contact : les orteils du pied qui va quitter le sol n'ont pas rompu le contact et le talon fournit l'appui principal (double contact initial, ou DC 1). • Pendant la période intermédiaire, un seul pied à plat au sol) est en contact avec le sol (simple contact, SC). • En fin de phase d'appui, les orteils du côté observé fournissent encore un contact, tandis que le talon controlatéral accepte la majeure partie du poids du marcheur (double contact final, ou DC2).
Facteurs de variation des paramètres cinématiques spatio-temporels de marche • La vitesse de marche spontanée et maximale est maintenue jusqu’à la 7ème décade. • La cadence ne se modifie pas avec l’âge (Campbell et al., 1989) mais les sujets de plus de 70 ans ont tendance à diminuer leur longueur de cycle et à augmenter leur phase de double-appui. • Les durées de phase d’appui et d’oscillation sont très stables : à cadence naturelle, elles représentent respectivement 58-61% et 42-39 % de la durée du cycle. • Quand la cadence et la vitesse de marche augmentent, la phase d’appui décroit 3 à 4 fois plus proportionnellement à la phase d’oscillation. • Cadence et longueur de pas sont en relation linéaire entre 80 et 120 pas par minute. • L’augmentation de la vitesse résulte d’un accroissement en proportion égale de la cadence et de la longueur de pas. • Au-delà d’une cadence de 120 pas par minute, seule la cadence augmente avec la vitesse (Nilsson et al., 1985). • On notera que la période de double appui est présente uniquement pendant la marche et disparaît pendant la course.
Contrôle de la marche • 3 éléments essentiels dans la locomotion (Pailhous et Clarac) • Générateurs centraux responsables de la rythmicité de l’activité motrice • Éléments déclencheurs internes ou externes qui ont pour but d’initier le programme • Boucles de régulation proprioceptives, vestibulaires et visuelles
Selection of a motor program is performed in the basal ganglia, which receives inputs from the cortexand thethalamus. • The basal ganglia output stage (pallidum) inhibits command centres in the diencephalic locomotor region (DLR) and the mesencephalic locomotor region (MLR) during resting conditions. Through a well-controlled inhibition of pallidal regions, the spinal CPG for locomotion can be activated via the reticulospinal (RS) neurons. • In the brainstem, information is further integrated based on visual, sensory and vestibular inputs to control both steering and posture. • In all vertebrates, the spinal cord CPG neurons are modulated by local sensory feedback. • MLR is located at the mesopontine boarder at the caudal pole of the cholinergic pedunculopontine and the cuneiform nuclei
Vestibulaires R. L Di.? R. L Més. R. S Th. Fx TS - RtS- RuS - VS Cx M / AMS Hippoc / Cx Pariétal NGC Visuelles Cervelet Fs SCV Vestibulaires Visuelles Fs SCD GSM, moelle Motoneurones Systèmes Proprioceptifs Marche
Centre locomoteur spinal (CPG) • Ceux-ci se réfèrent à un (des) réseau(x) neuronal(aux), dont le but serait de générer le rythme de décharge des motoneurones spinaux (Grillner, 1985). • La présence de CPGs est démontrée chez le chat, probablement un par membre (voir pour revue Duyssens et Crommert, 1998). • La présence de CPGs chez l’homme adulte est suggérée par la présence de contractions musculaires rythmiques pouvant être générées chez des sujets paraplégiques (Bussel et al., 1988, 1996) ou par l’activité locomotrice du nouveau né suspendu (Patla et al., 1995) notamment.
chez le rat nouveau-né, les centres induisant la locomotion se situent à deux niveaux de la moelle épinière • 1)Le système nerveux non myélinisé est totalement isolé, du tronc cérébral à la moelle sacrée. • 2) les réseaux locomoteurs peuvent peuvent être localisés au niveau C5/C8 et L1/L5. • 3) Le rythme peut être induit par des acides aminés excitateurs (NMDA, AMPA),cou par de la sérotonine.
Centres nerveux supérieurs : contrôle de l’adéquation de la marche avec le milieu • Les voies de contrôle supra-spinales • Cortex moteur et associatif, aire motrice supplémentaire : boucles avec le système des ganglions de la base et le cervelet : rôles dans la planification, la programmation et l’initiation du mouvement. • Hippocampe et cortex pariétal, permettant d’assurer une marche orientée dans l’espace (codage d’informations topologiques, traitement des informations sensorielles et visuelles).
Centres nerveux supérieurs : contrôle de l’adéquation de la marche avec le milieu • Les voies de contrôle supra-spinales • Les ganglions de la base: • le striatum (noyau caudé et putamen), • segments internes et externes du globus pallidus (GPe, GPi), • deux composantes de la substance noire, pars compacta et pars reticulata, • noyau subthalamique. • Les ganglions de la base sont organisés en une série de circuits parallèles. • Les signaux d'entrée sont délivrés par les afférences issues du cortex cérébral. • Les structures de sortie sont le pallidum int ++++ et pars reticulata de la substance noire. • Pour Marsden, les ganglions de la base sont notamment impliqués dans le contrôle moteur avec pour rôle essentiel l'exécution automatique de plans moteurs appris.
Les ganglions de la base • Sur un plan expérimental : • Striatum et Pallidum ventral s’ils sont stimulés pharmacologiquement par des amphétamines, provoquent une activité motrice proportionnelle à la stimulation pharmacologique • Région locomotrice mésencéphalique : subit un contrôle inhibiteur du striatum et du pallidum ventral • Noyau pédunculo-pontin: cette région présente des rapports d’activité corrélés aux activités motrices. Elle pourrait jouer un rôle dans les phases de transition (phases posturales) ou d’initiation de la marche. Un rôle plus important chez l’homme est suggéré (Pahapill, 2002) • Noyau cunéiforme : sa rythmicité serait secondaire.
Les différents centres locomoteurs sous-corticaux • Les Russes (Shik et Orlovsky 1966) mettent au point une préparation dans laquelle • un chat décérébré, est capable de marcher sur un tapis roulant. • -Grâce à une stimulation continue du tronc cérébral, au niveau de la région locomotrice mésencéphalique (MLR), on obtient une marche automatique.
Le Noyau Pédonculo-Pontin (PPN) • Ce PPN a été dans le cadre de la locomotion étudié plus tardivement. • ( 1ere étude chez l’homme par Olszewski et Baxter en 1954) • Il est devenu aujourd’hui, un des éléments clé dans la mise place du comportement locomoteur.
Afférences et efférences du PPN • Le PPN assure l’interface nécessaire aux ganglions de la base pour agir sur la locomotion et le sommeil. • Les deux structures sont impliquées dans l’apprentissage et dans de nombreuses fonctions cognitives P.A. Pahapill,A.M. Lozano, Brain,2000
Fonctions multiples du PPN • Rôle dans la locomotion (Garcia-Rill et al. 1987) où le PPN est considéré comme faisant partie de la MLR. L’effet le plus efficace pour induire de la locomotion consiste à utiliser des Antagonistes GABA. • Rôle dans l’éveil et dans les cycles veille-sommeil: Les neurones cholinergiques du PPN contrôlent le sommeil paradoxal et les ondes PGO. • Réponse de sursaut: La stimulation auditive provoque une réponse musculaire en quelques ms avec éveil généralisé.
Deux contrôles, l’un pour la posture par le PPN, l’autre pour la locomotion par la MLR, assurent la marche du chat.
Tractus mesencephalus nervi trigemini Facial dysesthesia? Oculomotor sign? Sensitive sign? Sensitive sign? Cerebellar sign? Pyramidal sign? Nucleus intercollicularis Posterior Fasciculus longitudinalis dorsalis Tractus tectospinalis Internal Nucleus nervi trigemini Fasciculus anterolateralis Nucleus colliculus inferieur Nucleus nervi trochlearis Fasciculus longitudinalis medialis Nucleus cuneiformis Nervus trochlearis Tractus tegmentalis centralis Nucleus tegmentalis pediculopontinus pars dissipata rostral part Pedunculus cerebellaris superior Lemniscus medialis Zona incerta Tractus parietotemporo pontinus Substantia nigra pars compacta Pedunculus mamillaris Nucleus interpeduncularis Tractus pyramidalis Tractus fronto pontinus Nucleus pontis Fibrae pontocerebellares
Voies de contrôle • Voies cérebelleuses : les CPGs envoient des copies de commande au cervelet pour leur permettre d’exercer une action sur les motoneurones. Les faisceaux spino-cérébelleux ventraux exercent ainsi leur action sur la phase d’extension. • Voies vestibulo-spinales : action sur la phase d’initiation de la marche et la phase d’appui. Il s’agit d’une action sur les muscles extenseurs (adaptation aux contraintes posturales : Drew 1991). • Système réticulo-spinal : action sur les extenseurs (action posturale). • Voies rubrospinales : stimulées notamment pendant la phase oscillante (activité sur les muscles fléchisseurs). • Voies cortico-spinales : ajustement du positionnement volontaire (Belorenova et Sirota, 1988).
Afférences • La persistance de la locomotion après déafférentation n’implique pas que ces afférences puissent contrôler le rythme moteur. • Toutefois, les afférences, notamment sensitives, ont un rôle sur la locomotion : la stimulation cutanée proximale peut provoquer l’arrêt du cycle pour le membre stimulé (Clarac, 1991). • L’action de ces afférences se fait également au niveau des motoneurones, provoquant des réactions d’appui ou de flexion (adaptation du comportement réflexe en fonction du cycle locomoteur). • D’autres afférences, visuelles, auditives notamment modulent la locomotion. • Ces systèmes d’information, parfois redondants, permettent d’adapter la marche à son environnement.
Facteurs de variation des paramètres cinématiques spatio-temporels de marche • La vitesse de marche spontanée et maximale est maintenue jusqu’à la 7ème décade. • La cadence ne se modifie pas avec l’âge (Campbell et al., 1989) mais les sujets de plus de 70 ans ont tendance à diminuer leur longueur de cycle et à augmenter leur phase de double-appui. • Les durées de phase d’appui et d’oscillation sont très stables : à cadence naturelle, elles représentent respectivement 58-61% et 42-39 % de la durée du cycle. • Quand la cadence et la vitesse de marche augmentent, la phase d’appui décroit 3 à 4 fois plus proportionnellement à la phase d’oscillation. • Cadence et longueur de pas sont en relation linéaire entre 80 et 120 pas par minute. • L’augmentation de la vitesse résulte d’un accroissement en proportion égale de la cadence et de la longueur de pas. • Au-delà d’une cadence de 120 pas par minute, seule la cadence augmente avec la vitesse (Nilsson et al., 1985). • On notera que la période de double appui est présente uniquement pendant la marche et disparaît pendant la course.