3D Surface Localization with Terrain Model
3D Surface Localization with Terrain Model. Yang Yang , Miao Jin, Hongyi Wu Presenter: Buri Ban The Center for Advanced Computer Studies (CACS) University of Louisiana at Lafayette . Applications of Wireless Sensor Networks. Localization in Sensor Networks.

3D Surface Localization with Terrain Model
E N D
Presentation Transcript
3D Surface Localization with Terrain Model Yang Yang, Miao Jin, Hongyi Wu Presenter: Buri Ban The Center for Advanced Computer Studies (CACS) University of Louisiana at Lafayette
Localization in Sensor Networks • Location information is important • Devices need to know where they are. • We want to know where the data is from. • It helps infrastructure establishment. For examples, geographical routing, sensor coverage, et al.
Localization in Sensor Networks • Wireless Sensors • Deployed on 2D plane (ground) • Deployed on 3D space (air, underwater) • Deployed on 3D surface (terrain)
3D Surface Localization • Applications • Volcano Monitoring • ZebraNet
Challenges in 3D Surface Localization • Connectivity and surface distance information only are not enough for 3D surface localization. (c) Deformation to wave shape. (a) A 2D Surface (b) Deformation to cylinder.
Previous Methods • Y. Zhao, H. Wu, M. Jin, S. Xia, "Localization in 3D Surface Sensor Networks: Challenges and Solutions”, INFOCOM'12, pp. 55-63 ,2012. • Y. Zhao, H. Wu, M. Jin, Y. Yang, H. Zhou, and S. Xia, “Cut-and-sew:Adistributed autonomous localization algorithm for 3d surface wireless sensor networks,” MobiHoc'13, pp. 69-78, 2013.
Previous Methods • Assume each sensor node knows the distance between its neighboring nodes. • Assume each sensor node can measure its own height information.
Our Approach • To reduce the cost of hardware, is it possible not using height information? • If possible, we still need some extra information, since a surface network is non-localizable with pure connectivity and surface distance information.
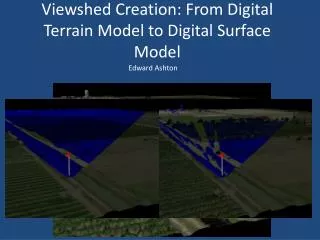
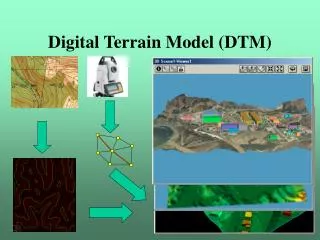
Digital Terrain Model (DTM) • A 3D representation of a terrain’s surface. • Commonly built using remote sensing technology. • Available to public with a variable resolution up to one meter.
Outline • Theoretical background and motivation of our approach • Our approach • Discussions • Simulations • Conclusion and future works
Theoretical Background • Conformal structure is an intrinsic geometric structure of surfaces: • Tolerate a small local deformation of a surface; • Surfaces sharing the same conformal structure exist conformal mapping between them. • A conformal mapping is a one-to-one and continuous mapping/function that preserves angles and local shape.
Motivation of Our Approach • The triangular mesh of a DTM and the triangular mesh extracted from the connectivity graph of a network deployed over the terrain surface approximate the geometric structure of the same terrain surface. Theoretically, the two triangular meshes share the same conformal structure. There exists a conformal mapping between them. Sensor Network mesh M2 DTM mesh M1
Motivation of Our Approach • It is extremely difficult to directly construct a conformal mapping between two 3D surfaces. We can conformallymap the two surfaces to 2D plane, and then construct a conformal mapping between the mapped two planar domains. The three conformal mappings induces a conformal mapping between the two 3D surfaces. • Based on this mapping, each sensor node of the network can easily locate reference grid points from the DTM to calculate its own geographic location.
Outline • Theoretical background and motivation of our approach • Our approach • Discussions • Simulations • Conclusion and future works
Overview of Our Approach DTM mesh M1 2D triangular mesh D1 Alignment Localization Sensor Network mesh M2 2D triangular mesh D2
Step 1: Conformal Mapping to Plane • Construct Triangular Mesh for both DTM and Sensor Network. • A DTM is represented by a grid of squares. It is straightforward to convert the grid into a triangulation, e.g., by simply connecting a diagonal of each square. • For Sensor Network with one-hop distance information available, a simple distributed algorithm can extract a refined triangular mesh from the network connectivity graph.
Step 1: Conformal Mapping to Plane • Given a triangular mesh M embedded in 3D. We apply Discrete Surface Ricci Flow to conformally map M to a planar region, denoted as D in 2D. The mapping result is stored at each vertex V as a complex number, which serves as the planar coordinates of V when M is mapped to D.
Overview of Our Approach DTM mesh M1 2D triangular mesh D1 Alignment Localization Sensor Network mesh M2 2D triangular mesh D2
Step 2: Alignment • Randomly deployed three Anchor Nodes (Sensors with GPS information) Sensor Network mesh M2 2D triangulation mesh D2
Step 2: Alignment • A Mobius Transformation is a conformal mapping between complex plane to itself, with a set of three points mapped to another set of three points. Property: aligns to D2 D1
Overview of Our Approach DTM mesh M1 2D triangular mesh D1 Alignment Localization Sensor Network mesh M2 2D triangular mesh D2
Step 3: Localization • If DTM has a high density, a sensor node simply determines its own 3D coordinates according to the nearest triangle vertex of DTM. • If DTM has a low density, with the aligned planar coordinates, each sensor node locates three nearest grid points on D1, and use the Barycentric Coordinates and grid points’3D coordinates to get sensors’ approximate 3D location.
Step 3: Barycentric Coordinates • Barycentric Coordinates provides a convenient way to interpolate a function on triangles as long as the function’s value is known at all vertices. b b b
Outline • Theoretical background and motivation of our approach • Our approach • Discussions • Simulations • Conclusion and future works
Discussions: Performance with # of Anchor Nodes The size of Anchor Nodes
Outline • Theoretical background and motivation of our approach • Our approach • Discussions • Simulations • Conclusion and future works
Simulations: Different Digital Terrain Models Different Digital Terrain Models
Simulations: The Distribution of Localization Errors under Different Sets of Anchor Nodes The distribution of localization errors under different sets of anchor nodes
Simulations: Connectivity Only Networks with Connectivity Information Only
Outline • Theoretical background and motivation of our approach • Our approach • Discussions • Simulations • Conclusion and future works
Conclusion and Future Works • A fully distributed algorithm to localize a wireless sensor network deployed on the surface of complex 3D terrains with range distance measurement only. • Both the 3D terrain surface and the network can be any complicated shape, not necessarily convex. • Future works: Incorporate those useful contour features of surfaces like the peaks of valleys • into the alignment algorithm.