Download
1 / 18
180 likes | 351 Vues
Naota: tether-controlled, remote operated robot. By: Zach Wheeler and Chris Wells. Naota. Project Objectives. Robot accepts user movement commands via a tethered mouse. Responds promptly and deterministically to user’s mouse movements.

E N D
Naota: tether-controlled, remote operated robot By: Zach Wheeler and Chris Wells
Project Objectives • Robot accepts user movement commands via a tethered mouse. • Responds promptly and deterministically to user’s mouse movements. • Robot movements based on an attempt to “balance” user mouse movements.
Specifications • Can move anywhere on the first floor of building 17 • Can only move on level surfaces • 1 ft/sec maneuvering speed, 3 ft/sec maximum speed • 15 minutes minimum operating time • Turns within its own space
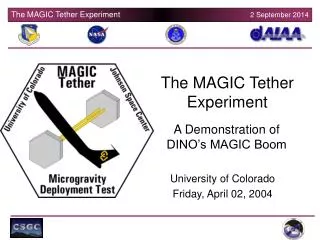
System Diagram • The user moves the tethered command mouse, which increments X and Y counters in the HCS12. • The HCS12, sensing a counter imbalance, commands the motors to move. • The reference mouse moves with the robot, decrementing the counters until they balance again.
Sensors • 2 mice for motion control: the onboard reference mouse, and the tethered command mouse.
Naota’s Operational Environment(The unshaded area) The robot can operate anywhere in the unshaded area, up to the length of its tether (currently 30 ft).
User Interface The user can... • Control Naota by moving the tethered command mouse. • Turn power on and off with Naota’s three power switches.
WorkStill to be done • Connect ACB to HCS12 • Attach and connect reference mouse • HCS12 control code • Calibrate motor control
Power Each drive motor is powered by a 7.2 Volt NiMH battery (3000 mA-hours). Each motor draws 4 Amps when fully loaded at maximum speed, and 0.4 Amps when unloaded. Another NiMH battery is mounted on the superstructure. It will run the HCS12, the two mice (command and reference), and the ACB.
Test Plan • Test the mice. • Test the ACB. • Test signals over the tether. • Test mouse counter code. • Test motor control code. • Integrated testing: attempt to move the robot with the mouse.
Safety First The only foreseeable safety hazard is the potential for collision with a pedestrian (possibly resulting in bruised shins and four-letter words). The robot is driven by a human, who will be careful The motors make a relatively loud sound, so nearby pedestrians will likely notice in time to dodge