MICROPROCESSORS-8086
MICROPROCESSORS-8086. Architecture Programming Interfacing. FOR CONVINIRNT STUDY OF MICROPROCESSORS TWO TYPES OF MODELS ARE USED :. PROGRAMMER’S MODEL :- THIS MODEL SHOWS FEATURES , SUCH AS INTERNAL REGISTERS, ADDRESS ,DATA & CONTROL BUSES ; THAT WE NEED TO PROGRAM THE DEVICE.

MICROPROCESSORS-8086
E N D
Presentation Transcript
MICROPROCESSORS-8086 • Architecture • Programming • Interfacing
FOR CONVINIRNT STUDY OF MICROPROCESSORS TWO TYPES OF MODELS ARE USED : • PROGRAMMER’S MODEL :- THIS MODEL SHOWS FEATURES , SUCH AS INTERNAL REGISTERS, ADDRESS ,DATA & CONTROL BUSES ; THAT WE NEED TO PROGRAM THE DEVICE. • THE HARDWARE MODEL:- THIS MODEL SHOWS THE PIN DIAGRAM AND THE SIGNALS TO/FROM THIS PINS TO UNDERSTAND HOW A MOCROCOMPUTER SYSTEM IS BUILT AROUND.
MICROCOMPUTER • A MICROCOMPUTER SYSTEM IS ONE WHICH USES A MICROPROCESSOR AS ITS CPU • IN ADDITION THE MICROCOMPUTER ALSO HAS A MEMORY UNIT,INPUT/OUTPUT DEVICES AND SYSTEM BUSES. • THE SYSTEM BUSES ARE OF THREE TYPES: 1.ADDRESS BUS 2.DATA BUS 3.CONTROL BUS • PHYSICALLY BUSES ARE GROUP OF WIRES
8086 BUSES • THE 8086 HAS • 20 ADDRESS LINES • 16 DATA LINES • 4-10 CONTROL LINES. • WITH THIS THE 8086 IS ABLE • TO ADDRESS 1,048,,576 (220 ) MEMORY LOCATIONS/PORTS. • TO MANIPULATE AND/OR OPERATE ON 16-BITS(2-BYTES) OF DATA AT A TIME. • TO GENERATE NECESSARY CONTROL SIGNALS.
THE INTERNAL ARCHITECTURE OF 8086 CAN BE MAINLY DIVIDED INTO TWO UNITS: • BUS INTERFACE UNIT (BIU) • EXECUTION UNIT (EU) ARCHITECTURE • THE BIU CONTAINS : • CODE SEGMENT REGISTER (CS) • DATA SEGMENT REGISTER (DS) • EXTRA SEGMENT REGISTER (ES) • STACK SEGMENT REGISTEER (SS) AND • INSTRUCTION POINTER (IP)
THE EU CONTAINS THE FOLLOWING 8-BIT REGISTERS: • AH & AL (AX-16 BIT) • BH & BL (BX-16 BIT) • CH & CL (CX-16 BIT) • DH 7 DL (DX-16 BIT) • IT ALSO INCLUDES THE FOLLOWING 16-BIT REGISTERS: • STACK POINTER (SP) • BASE POINTER (BP) • SOURCE INDEX (SI) • DESTINATION INDEX (DI)
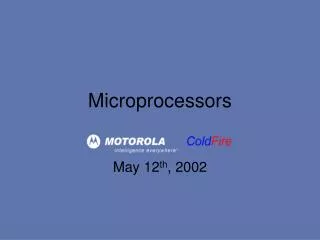
40 VCC AD15 GND 1 A16-A19 & S3-S6 2 35 34 BHE/S7 33 MN/MX 32 RD AD14 TO AD0 31 RQ/GTO(HOLD) 30 RQ/GT1(HLDA) 8086 CPU 29 LOCK (WR) 28 S2 (M/IO) 27 S1 (DT/R) 16 26 NMI S0 (DEN) 17 INTR 18 25 QS0 (ALE) CLK 19 24 QS1(INTA) GND 20 TEST 23 RESET 21 22 READY
BASIC 8086 MINIMUM MODE SYSTEM MN/MXM/IO INTA RD WR DT/R DEN ALE AD0-AD15 A16-A19 CLK READYRESET 8284A CLOCKGENE-RATOR 8282 LATCH ADDR WAIT STATE GENERATOR 8286 TRAN- CEIVER ADDR/DATA DATA RAM 2142 PERI- PHERAL 2716 PROM
TIMING SEQUENCE • AN EXTERNAL CLOCK GENERATOR DEVICE IS CONNECTED TO 8086 TO PROVIDE CLOCK SIGNALS THROUGHOUT THE SYSTEM. • ONE CYCLE OF CLOCK IS CALLED A STATE OR T-STATE. • EACH BASIC OPERATION SUCH AS READING A MEMORY LOCATION OR WRITING TO A PORT REQUIRES SEVERAL STATES.THIS GROUP OF STATES IS CALLED A MACHINE CYCLE. • THE TOTAL TIME REQUIRED TO FETCH AND EXECUTE AN INSTRUCTION IS CALLED AN INSTRUCTION CYCLE. AN INSTRUCTION CYCLE CONSISTS OF ONE OR MORE MACHINE CYCLE.
BASIC SIGNAL FLOW ON 8086 BUSES BASICALLY THERE ARE TWO OPERATIONS TO SEE: 1.READ OPERATION 2. WRITE OPERATION WILL SEE WHAT IS GOING ON DURING THIS TWO CYCLES OF OPERATION.
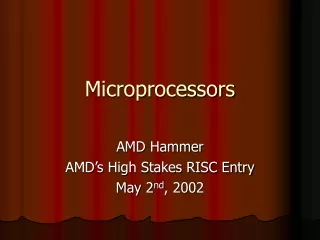
READ CYCLE • HERE WE WILL SEE THE ACTIVITIES CARRIED OUT ON 8086 BUSES AT VARIOUS TIME INSTANTS WHEN IT READS FROM A MEMORY LOCATION OR FROM A PORT. • HERE WE WILL ASSUME THAT THE 8086 IS OPERATED IN IS MINIMUM MODE.
T1 T2 T3 TW T4 CLK M/IO ALE MEMORY ACCESS TIME ADDR/ DATA RESERVED FOR DATA VALID D15-D0 A15-A0 ADDR/ STATUS A19-A16 RD/INTA READY DT/R DEN
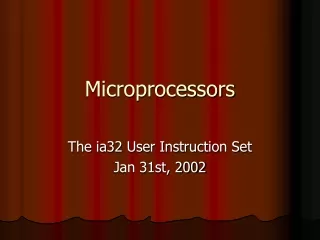
WRITE CYCLE • HERE WE WILL SEE THE ACTIVITIES CARRIED OUT ON 8086 BUS AT VARIOUS TIME INSTANTS WHEN IT WRITES TO A PORT OR A MEMORY LOCATION. • HERE WE WILL ASSUME THAT THE 8086 IS OPERATED IN IS MINIMUM MODE.
T1 T2 T3 TW T4 CLK M/IO ALE ADDR/ DATA A15-A0 DATA OUT (D15-D0) ADDR/ STATUS A19-A16 WR READY DT/R DEN
ADDRESSING 1. ADDRESSING MEMORY 2. ADDRESSING PORTS • DECODER IS THE CIRCUITRY USED FOR ADDRESING. IT SERVES TWO PURPOSES: • TO ENABLE RAM,ROM OR PORT. • TO MAKE SURE THAT ONLY ONE DEVICE IS ENABLED AT A TIME.
A SYSTEM ROM DECODER • TO UNDERSTAND THE CONCEPT A GENERAL DIGITAL SYSTEM WITH 8 DATA LINES AND 16 ADDRESS LINES IS CONSIDERED. • THE HARDWARE USED CONSIST • 2732 ROM-8(EACH-4 KB) • 74LS138 DECODER/DEMULTIPLEXER • 16 ADDRESS LINES • 8 DATA LINES
A0 A1 A2 A11 ROM 1 2732 ROM 7 2732 ROM 0 2732 CS CS CS D0 D5 D6 D7 Y0 Y1 Y7 A12 74LS138 A13 G2A G2B G1 A14 A15 RD +5V
A SYSTEM RAM DECODER TO THE SAME SYSTEM WE WANT TO ADD 16KB RAM.SO ADDITIONAL HARDWARE WE REQUIRE: • 2142 RAM-8(EACH 2KB) • ONE MORE 74LS138 DECODER/DEMULTIPLEXER • SINCE WE HAVE EACH RAM OF 2KB(2048 BYTES) ,WE NEED 11 ADDRESS LINES TO ADDRESS EACH MEMORY LOCATION WITHIN A RAM.AS WE HAVE OCCUPIED ADDRESSES 0000 THROUGH 7FFF FOR ROM.WE MUST START RAM ADDRESSES AFTER 7FFF. • SO WE HAVE 5 MORE ADDRESS LINES.WHICH WE WILL USE TO PROVIDE ADDRESS DECODING.
A0 A1 A2 A10 RAM 1 2142 RAM 7 2142 RAM 0 2142 CS CS CS D0 D5 D6 D7 Y0 Y1 Y7 A11 74LS138 A12 G2A G2B G1 A13 A14 GND A15
A SYSTEM PORT DECODER A SYSTEM PORT CAN BE ADDRESSED IN TWO WAYS : • USING MEMORY MAPPED I/O- HERE A PORT IS TREATED AS IF IT IS A MEMORY LOCATION. • IT USES MEMORY RELATED INSTRUCTIONS. • THE OPERATION IS FASTER. • A MAXIMUM OF 1MB INPUT AND 1MB(220) OUTPUT DEVICES CAN BE ADDRESSED. • IT USES MEM.READ AND MEM.WRITE CONTROL SIGNALS. • IT CONSUMES THE ADDRESS RANGE USED BY PROGRAM MEMORY. • DECODING IS COMPLEX.
USING DIREC I/O-HERE AN INPUT OR AN OUTPUT DEVICE IS TREATED AS A DISTINCT I/O DEVICE. • IT DOES NOT CONSUME PROGRAM MEMORY. • THE DECODING IS SIMPLE. • IT USES IN AND OUT INSTRUCTIONS. • A MAXIMUM OF 64K BYTE TYPE INPUT AND OUTPUT DEVICES CAN BE ADDRESSED OR 32K WORD TYPE INPUT AND OUTPUT DEVICES CAN BE ADDRESSED. • IT USES IORD AND IOWRT CONTROL SIGNALS. • OPERATION IS SLOWER.
A15 A14 G1 Y0 Y1 Y2 Y3 Y4 Y5 Y6 Y7 CS (CHIP SELECT) SIGNAL FOR PORT DEVICES A13 G2B 74LS138 A12 G2A A5 A4 A3
8086 PHYSICAL MEMORY THE TOTAL MEMORY (1MB) OF 8086 IS ARRANGED IN TWO BANKS. AN ODD BANK AND AN EVEN BANK. BOTH THE BANKS HAVE EQUAL NO. OF LOCATIONS. THE ODD BANK CONTAINS ODD NUMBERED MEM. LOCATIONS.IT IS KNOWN AS UPPER BANK. THE EVEN BANK CONTAINS ONLY EVEN NUMBERED MEM. LOCATIONS.IT IS KNOWN AS LOWER BANK. THIS ARRANGE MENT IS DONE IN ORDER TO SPEED UP THE OPERATION. THE ARRANGEMENT AND THE SIGNAL FOLLOWED, EXPLAINS THE SAME.
THE 8086 MEMORY BANK UPPER BANK LOWER BANK ODD EVEN CS CS A1---A19 A0 BHE D15-D8 D7-D0
ADDRESSING WITH 8086 • PROBLEM: TWO 16K ROM AND TWO 32K RAM ARE REQUIRED TO BE INTERFACED WITH 8086 CPU.THE RAM ADDRESS MUST START AT 00000H.THE ROM ADDRESS RANGE MUST INCLUDE FFFF0H IN ITS RANGE.
ADDRESS MAP THE RAM ADDRESS STARTS AT 00000H. TOTAL RAM IS 2*32K. SO RAM ADDRESS RANGE IS FROM 00000H TO 0FFFFH.(FFFF-0000)H=216 =64K. SINCE THE ROM ADDRESS MUST INCLUDE FFFF0H. WE TAKE LAST ADDRESS OF ROM AS FFFFFH. AS TOTAL SPACE FOR ROM IS 2*16K,THE FIRST ADDRESS FOR ROM IS F8000H. (FFFFF-F8000)H=215=32K. ADDRESS LINES A1-A14 ARE CONNECTED TO ROM.ADDRESS LINES A1-A15 ARE CONNECTED TO RAM.AND REMAINING LINES ARE USED FOR CHIP SELECTION.(NOTE: A0 IS RESERVED FOR BANKS.)
TO GENERATE THE CHIP SELECT SIGNAL THE FOLLOWING LOGIC IS USED: THE CHIPSELECT SIGNAL IS ACTIVE LOW. SO A PARTICULAR CHIP CAN BE SELECTED ONLY WHEN THIS SIGNAL IS LOW. SECONDLY AT A TIME ONLY ONE CHIP SHOULD BE SELECTED. FURTHER ,THE ODD BANK WILL BE ENABLED ONLY IF BHE SIGNAL IS ACTIVATED.AND THE EVEN BANK WILL BE ENABLED ONLY IF AO SIGNAL IS LOW.
HERE WE CONSIDER AS AN EXAMPLE A SYSTEM WITH FEW PORTS. • AN 8251(UNIVERSAL SYNCHRONOUS ASYNCHRONOUS RECEIVER TRANSMITTER) • TWO 8255A(PROGRAMMABLE PARALLEL PORTS.) • AN 8279 (DISPLAY AND KEYBOARD INTERFACING.) • AN 8275 (CRT CONTROLLER) • AN 8272A(FLOPPY DISK CONTRLLER)
BHE OFFBOARD P O R T S E L E C T A15 G2A G2B G A5 Y0 Y1 Y2 Y3 Y4 Y5 Y6 Y7 8255-1 8255-2 A4 8251 74LS138 8279 8275 8272 A3 RESERVED FOR FUTURE USE. A2
LINES A1 AND A0 ARE USED FOR SETTING INTERNAL REGISTERS OF THE ADDRESSED PORT. • NOTE THAT THIS IS AN ABSOLUTE ADDRESSING.i.e. A PORT CAN BE SELECTED FOR ONLY ONE ADDRESS. • NON-ABSOLUTE ADDRESING ALSO EXISTS.THERE A PORT CAN BE SELECTED FOR MORE THAN ONE ADDRESSES.
THE OFF-BOARD DECODER • THE SDK-86 USES AN OFF-BOARD CIRCUITRY . • THE PURPOSE OF THIS CIRCUITRY IS TO PRODUCE AN ACTIVE LOW OFF BOARD SIGNAL WHENEVER THE 8086 ADDRESSES A PORT OR MEMORY WHICH IS NOT DECODED ON THE SDK-86 BOARD. • USUALLY WHEN WE CONNECT ADDITIONAL PORT USING DIRECT I/O, THIS DEVICE IS CONSIDERED AS OFF-BOARD(OUT OF THE DECODING MAP OF THE SYSTEM). • SO WHENEVER THIS PORT IS CALLED UPON,THE 8086 ASSERTS THE OFF BOARD SINAL. • TO COMMUNICATE WITH OFF BOARD DEVICES,EXTRA HARDWARE SUCH AS 74LS138 OR AN EPROM DECODER IS REQUIRED FOR ADDRESSING THIS DEVICE.
8088 MEMORY AND PORT ADDRESSING • IN 8088 THERE ARE ONLY 8 DATA LINES AND 20 ADD.LINES. • THE 8088 MEMORY IS NOT DEVIDED INTO ODD AND EVEN BANKS.BUT THERE IS ONLY A SINGLE BANK. • THERE ARE 1MB LOCATIONS EACH 1-BYTE LONG.SO TO READ OR WRITE A WORD 8088 REQUIRES TWO MACHINE CYCLES ALWAYS.
THE 8086 TIMING PARAMETERS • THE 8086 TIMING PARAMETERS ARE REQUIRED TO FIND WHETHER A PARTICULAR DEVICE IS FAST ENOUGH TO WORK IN OUR SYSTEM. IF NOT WE CAN USE WAIT STATES TO ALLOW THE SLOW DEVICE TO RESPOND. • THE 8086 RECEIVES TWO DIFFERENT CLOCK SIGNALS FRON 8284 CLOCK GENERATOR: 4.9MHz AND 2.45MHz USING A DIVIDE BY 2 NETWORK.
NOW SUPPOSE THAT 8086 USES A FREQ. OF 4.9 MHz AND WE WANT TO DETERMINE WHETHER 2716 EPROMs ARE ABLE TO WORK CORRECTLY WITH OUR SYSTEM. • TO READ FROM EPROM, WE NEED TO PROVIDE ITS ADDRESS,WE ALSO NEED TO PROVIDE ITS CHIP SELECT SIGNAL AND IN ADDITION WE ALSO NEED TO ENABLE ITS OUTPUT. • FOR THIS ,THE 8086 PROVIDES ON AD0-AD15 THE ADDRESS OF THE PARTICULAR LOCATION,THE CE (CHIP ENABLE-ACTIVE LOW) SIGNAL AND OE (OUTPUT ENABLE-AVTIVE LOW SIGNAL).
FROM A DATA BOOK THE TYPICAL ACCESS TIMES FOR EPROM 2716 ARE: • Tacc : 450 ns • THIS MEANS THAT IF 2716 HAS ITS CE AND OE SIGNALS ENABLED,THAN IT WILL TAKE AT THE MAX. 450 ns,AFTER THE ADDREES IS PUT ON AD0-AD15 LINES. • Tce: 450 ns • THIS MEANS THAT THE ADDRESS AND OE SIGNALS ARE ALREADY ENABLED THAN IT WILL TAKE AT THE MAX. ,450 ns AFTER CE SIGNAL IS ENABLED. • Toe: 120 ns • THIS THE MAX. TIME REQUIRED WHEN AD0-AD15 AND CE SIGNALS ARE ENABLED BUT OUTPUT BUFFERS OF 2716 ARE NOT ENABLED.
NEXT, WE CHECK THAT EACH OF THESE TIMES ARE SHORT ENOUGH TO WORK WITH 8086 AT 4.9MHz. • LOOKING AT THE WAVE FORMS OF READ CYCLE THERE IS A TIME GAP BETWEEN THE STARTING OF STATE-T1 AND THE TIME AT WHICH VALID ADDRESS IS AVAILABLE. • THIS TIME INTERVAL IS SYMBOLISED AS TCLAV TIME FROM CLOCK LOW TO ADDRESS VALID. AS PER 8086 DATA SHEET THIS TIME IS 110 ns MAX. • AGAIN LOOKING AT READ CYCLE ,WE FIND THAT VALID DATA MUST BE AVAILABLE BEFORE THE END OF T3.THERE ALSO EXISTS A TIME GAP BETWEEN ,THE LINE IS AVAILABLE FOR PUTTING VALID DATA AND THE END OF STATE-T3. • THIS TIME INTERVAL IS SYMBOLISED AS TDVCLTIME DATA MUST BE VALID BEFORE CLOCK GOES LOW. AS PER 8086 DATA SHEET THIS TIME IS 30 ns.
THE TIME BETWEEN THE END OF TCLAV AND THE START OF TDVCL IS THE TIME AVAILABLE FOR GETTING THE ADDRESS TO THE MEMORY AND TO Tacc THE MEMORY DEVICE. • THE TIME BETWEEN THE START OF TCLAV AND THE END OF TDVCL IS 3 T-STATES. • AT 4.9 MHz ,TIME FOR ONE T-STATE IS 2.04 ns. SO TOTAL TIME FOR 3 STATES IS 612 ns. • FROM THIS WE SUBTRACT TCLAV AND TDVCL. • =612-110-30=472 ns.
SO, 472 ns AVAILABLE FOR CALLING 2716 AND ACCESSING ITS DATA. • NOW,LOOKING AT THE MINIMUM MODE SYSTEM,WE SEE THAT THE ADDRESS INFORMATION FOR 2716 GOES THROUGH LATCHES 74S373. SO, THE PROPOGATION DELAY FOR THIS MUST BE SUBTRACTED FROM 472 ns.THE PROPAGATION DELAY (CALLING TIME OR GETTING ADDRESS TO 2716 TIME) IS 12 ns. THIS LEAVES 472-12=460 ns AS Tacc. • SO FROM THIS WE SEE THAT THE Tacc NEEDED FOR 2716 IS 450 ns max. WHILE THE 8086 PROVIDES 460 ns, AT LEAST. • SO, WE CONCLUDE THAT WE DO NOT NEED ANY WAIT STATE TO BE INSERTED. AS FAR AS Tacc. IS CONCERN.
ANOTHER PARAMETER TOBE CHECKED IS Tce. • THE CE SIGNAL REQUIRES EITHER A0 OR BHE AS ITS ENABLE SIGNAL. SO,IT REQUIRES THE SAME CALCULATION AS THAT OF Tacc. • SO,Tce ALSO DOESN’T NEED WAIT STATE. • THE LAST TO BE SEEN IS Toe. • THE OE SIGNAL WILL BE GENERARED WHEN RD SIGNAL IS APPLIED. • NOW, LOOKING AT THE READ CYCLE RD SIGNAL WILL NOT BE ASSERTED TILL THE STATE T2.THE RD SIGNAL WILL BE ENABLED WITHIN A TIME TCLRL AFTER T2 STARTS.THE MAX. VALUE FOR THIS SIGNAL IS 165 ns. AGAIN,Toe MUST BE ACTIVE BEFORE VALID DATA IS PLACED ON AD0-AD15. i.e. BEFORE STARTING OF TDVCL.
SO, SUM OF THESE TIMINGS MUST BE SUBTRACTED FROM THE TOTAL TIME AVAILABLE. • THE TOTAL TIME AVAILABLE IS STATE-T2 & T3.=408 ns. • 408-165-30=183 ns. • SO, 8086 PROVIDES 183 ns FOR ENABLING OUTPUT BUFERS. • WHILE THE TIME Toe REQUIRED BY 2716 IS 120 ns. • SO, FOR Toe ALSO WE NEED NO WAIT STATE.
TROUBLESHOOTING AN 8086 BASED MICROCOMPUTER • TROUBLESHOOTING IS TO FIND FAULTS IN A SYSTEM THAT WAS WORKING WELL, ONCE. • THE FOLLOWING STEPS ARE RECOMMENDED FOR A SYSTEMATIC AND TIME-EFFECTIVE TROUBLESHOOTING.
IDENTIFYING THE SYMPTOMS. • CAREFULLY OBSERVE THE WORKING OF BAD SYSTEM AND TRY TO IDENTIFY THE SYMPTOMS. • 2. MAKING A CAREFUL VISUAL AND TACTILE INSPECTION. • CHECK FOR COMPONENTS THAT ARE EXCESSIVELY HOT. • DO NOT TOUCH FIRMLY,BECAUSE IT MAY RESULT IN SKIN BURN. • MAKE IT SURE THAT ALL ICs ARE FIRMLY SEATED IN THEIR SOCKETS AND NO PIN IS BENT. • CHECK FOR BROCKEN WIRES AND LOOSE CONNECTORS.
3. CHECKING POWER SUPPLY. • FROM THE MANUAL DETERMINE THE REQUIRED OPERATING VOLTAGE AND COMPARE IT WITH THE VOLTAGES AVAILABLE. ALSO CHECK THAT THE SAME VOLTAGE AVAILABLE AT PIN Vcc. • 4. SIGNAL ROLL CALL. • MAKE A CHECK AT SOME KEY SIGNALS e.g. CLOCK SIGNAL ON A CRO.OTHER SIGNAL SUCH AS ALE , RD AND WR SHOULD ALSO BE CHECKED.