Download
1 / 66
720 likes | 1.14k Vues
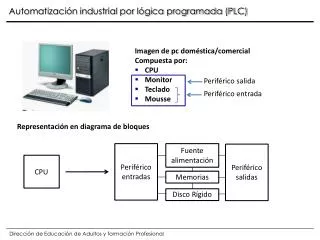
Automatización industrial por lógica programada (PLC). Imagen de pc doméstica/comercial Compuesta por: CPU Monitor Teclado Mousse. Periférico salida. Periférico entrada. Representación en diagrama de bloques. Fuente alimentación. Periférico entradas. Periférico salidas. CPU.

E N D
Automatización industrial por lógica programada (PLC) • Imagen de pc doméstica/comercial • Compuesta por: • CPU • Monitor • Teclado • Mousse Periférico salida Periférico entrada Representación en diagrama de bloques Fuente alimentación Periférico entradas Periférico salidas CPU Memorias Disco Rígido Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Representación en diagrama de bloques Fuente alimentación Periférico entradas Periférico salidas CPU Memorias RAM EEPROM Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Imagen de PLC convencional (a modo ilustrativo) Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Que es un controlador lógico programable ó (PLC)? Es un aparato electrónico digital que utiliza una memoria programable donde almacena instrucciones para implementar funciones específicas tales como lógicas, secuencias, temporizaciones, conteos y operaciones aritméticas para controlar máquinas y procesos. Una aplicación corriendo en un PLC puede ser interpretada como un tablero electromecánico convencional con una cantidad de relés, temporizadores y contadores en su interior, solo que ahora estos elementos serán simulados electrónicamente y entonces comienzan a aparecer las primeras ventajas. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Ventajas de utilizar un Controlador lógico programable ó (PLC)? El conexionado de estos elementos no se hará con cables sino en su gran mayoría mediante el programa , con la consecuente disminución de la mano de obra y tiempo de cableado. 2. La cantidad de contactos normales cerrados o normales abiertos por cada elemento simulado, o por cada elemento real conectado al equipo ( por ejemplo llaves, limites de carrera, sensores, etc.), tienen una sola limitación que es la capacidad del controlador elegido, lo que en general es inmensamente superior al de los aparatos de maniobra eléctricos reales. 3. En los contactos programados , realizados por la lógica del PLC no hay posibilidad de contactos sucios o bornes flojos, lo que lleva al mantenimiento una mínima expresión. 4. Al no tratarse de un equipo dedicado exclusivamente a una aplicación, es posible adecuarlo a cualquier tipo de maquina o proceso con solo desarrollar el programa adecuado. 5. Soportan sin problemas ruidos eléctricos, magnetismo, vibraciones y no necesitan de un ambiente especialmente acondicionado para funcionar. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Secuencia de funcionamiento del PLC Autodiagnóstico: Se realiza en el momento de encenderse y en el funcionamiento del mismo. Lectura: Se realiza en todo momento del funcionamiento del mismo y atiende las necesidades del proceso que atiende para alimentarse de la realidades del campo. Programa usuario: Es la idealización de la necesidad a atender, motores, equipos, máquinas, llevado a un nivel de programación que se puede modificar o corregir a necesidad. Comunicación: Realiza la conexión con el mundo exterior atendiendo las necesidades del proceso. Actualización: Refresca el estado de los elementos de salida para ejecutar acciones, contactores, electroválvulas, señales. Autodiagnóstico: Gestiona su propio relevamiento de su situación en todo. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Idealización de Secuencia de funcionamiento del PLC Periférico entradas Periférico salidas CPU Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Introducción Analógico / Digital En un reloj de agujas (analógico), la hora es representada por un ángulo de las agujas que aumenta proporcionalmente (análogamente) conforme pasa el tiempo y vemos los intervalos del tiempo. En cambio en un reloj digital, esta información es manejada internamente por unos y ceros que al pasar por un contador se van incrementando y solo vemos la representación de las hora y los minutos y no los intervalos de los mismos. Reloj analógico Reloj digital Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Introducción Analógico / Digital Las señales de campo pueden ser analógicas y digitales Señales analógicas: Varían desde el mínimo al máximo de la escala mostrando múltiples valores intermedios en la misma, por ejemplo: la temperatura del agua de 0 hasta 100 °C en los automóviles. Señales digitales: Varían desde el mínimo al máximo de la escala mostrando sólo dos valores de la misma, por ejemplo: alta temperatura en el motor de un auto. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Introducción Analógico / Digital Valores de señales de campo analógicas y digitales Señales analógicas: Suelen ser valores de 0 a 10 Volts 0 a 24 Volts 4 a 20 mA Señales digitales: Suelen ser valores de 0 ó 24 Volts 0 ó 110 Volts Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Estudio de módulos Entradas Analógicas: se utilizan para obtener desde el mundo exterior valores reales instantáneos del proceso que está manejando, como ser presiones, temperaturas, niveles, posiciones, etc. Módulos entradas Entradas Digitales: se utilizan para obtener desde el mundo exterior valores de estado instantáneos del proceso que está manejando, como ser contactos, llaves, pulsadores, fines de carrera. Salidas Analógicas: se utilizan para informar al mundo exterior valores reales instantáneos de decisiones que se están tomando, como ser aperturas de dispositivos, valores de velocidades, etc. Módulos salidas Salidas Digitales: se utilizan para informar al mundo exterior valores de estado instantáneos de decisiones que se están tomando, como ser bobinas de contactores, electroválvulas, lámparas, etc. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Elementos de entrada digitales Fotocélulas Sensores inductivos Finales de carrera Niveles Presostatos Flujómetros Relés Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Elementos de entrada analógicos Fotocélulas Un sensor fotoeléctrico es un dispositivo electrónico que responde al cambio en la intensidad de la luz. Estos sensores requieren de un componente emisor que genera la luz, y un componente receptor que “ve” la luz generada por el emisor. Todos los diferentes modos de sensado se basan en este principio de funcionamiento. Están diseñados especialmente para la detección, clasificación y posicionado de objetos; la detección de formas, colores y diferencias de superficie, incluso bajo condiciones ambientales extremas. Los sensores de luz se usan para detectar el nivel de luz y producir una señal de salida representativa respecto a la cantidad de luz detectada. Un sensor de luz incluye un transductor fotoeléctrico para convertir la luz a una señal eléctrica y puede incluir electrónica para condicionamiento de la señal, compensación y formateo de la señal de salida. El sensor de luz más común es el LDR -Light Dependant Resistor o Resistor dependiente de la luz-.Un LDR es básicamente un resistor que cambia su resistencia cuando cambia la intensidad de la luz. Existen tres tipos de sensores fotoeléctricos, los sensores por barrera de luz, reflexión sobre espejo o reflexión sobre objetos. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Elementos de entrada analógicos Fotocélulas Barrera de luz Las barreras tipo emisor-receptor están compuestas de dos partes, un componente que emite el haz de luz, y otro componente que lo recibe. Se establece un área de detección donde el objeto a detectar es reconocido cuando el mismo interrumpe el haz de luz. Debido a que el modo de operación de esta clase de sensores se basa en la interrupción del haz de luz, la detección no se ve afectada por el color, la textura o el brillo del objeto a detectar. Estos sensores operan de una manera precisa cuando el emisor y el receptor se encuentran alineados. Esto se debe a que la luz emitida siempre tiende a alejarse del centro de la trayectoria. Ventajas e Inconvenientes La luz solo tiene que atravesar el espacio de trabajo una vez, por lo que se favorecen grandes distancias de funcionamiento, hasta 60 metros. Son apropiadas para condiciones ambientales poco favorables, como suciedad, humedad, o utilización a la intemperie, así como independientemente del color del objeto realiza una detección precisa del objeto. La instalación se ve dificultada por tener que colocar dos aparatos separados y con los ejes ópticos alineados de manera precisa y delicada, ya que el detector emite en infrarrojos. Además de la imposibilidad de que sean transparentes.. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Precauciones de montaje A la hora del montaje hay que tener en cuenta las superficies reflectantes cercanas a los dispositivos, provocando un mal funcionamiento de la fotocélula. También hay que tener en cuenta las posibles interferencias mutuas por la cercanía de varios de estos dispositivos, además de controlar los ambientes sucios, ya que la suciedad afecta negativamente en la lente emisora. Reflexión sobre espejo La luz infrarroja viaja en línea recta, en el momento en que un objeto se interpone el haz de luz rebota contra este y cambia de dirección permitiendo que la luz sea enviada al receptor y el elemento sea censado, un objeto de color negro no es detectado ya que este color absorbe la luz y el sensor no experimenta cambios. Ventajas e Inconvenientes En estas fotocélulas el haz de luz recorre dos veces la distancia de detección, con lo cual las distancias de trabajo que se consiguen son medias (de unos 15 metros). El espejo es fácil de instalar, y no se necesita cableado hasta el mismo, por lo que solo hay que cablear un detector. Además de ser válidos para detección de objetos opacos, también cubren eficientemente aplicaciones con detección de objetos con cierto grado de transparencia. El problema más llamativo es que el objeto a detectar tiene que ser mayor que el espejo y, a ser posible, no reflectante, además de que la alineación tiene que ser precisa. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Precauciones de montaje Un objeto con superficie reflectante puede provocar errores de detección. esto se puede evitar haciendo que la reflexión del objeto a detectar no tenga la misma inclinación que el haz del detector. Reflexión sobre objeto Tienen el componente emisor y el componente receptor en un solo cuerpo, el haz de luz se establece mediante la utilización de un reflector catadióptrico. El objeto es detectado cuando el haz formado entre el componente emisor, el reflector y el componente receptor es interrumpido. Debido a esto, la detección no es afectada por el color del mismo. La ventaja de las barreras réflex es que el cableado es en un solo lado, a diferencia de las barreras emisor-receptor que es en ambos lados. Hay dos tipos de fotocélulas de reflexión sobre objeto, las de reflexión difusa y las de reflexión definida. Reflexión difusa En las fotocélulas de reflexión difusa sobre el objeto el emisor lanza un haz de luz; los rayos del haz se pierden en el espacio si no hay objeto, pero cuando hay presencia de objeto, la superficie de éste produce una reflexión difusa de la luz, parte de la cual incide sobre el receptor y se cambia así la señal de salida de la fotocélula. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Reflexión definida La reflexión en la superficie del objeto a detectar por las fotocélulas de reflexión definida normalmente es de carácter difuso, como en los sensores de reflexión difusa, o sea que los rayos reflejados salen sin una trayectoria determinada. Esto es muy importante, para no caer en la falsa idea de que la diferencia respecto a los sensores de reflexión difusa está en el tipo de reflexión; lo está en el tipo de óptica empleada. En las fotocélulas de reflexión definida la fuente de luz está a una distancia mayor que la distancia focal, por lo que el haz converge a un punto del eje óptico Ventajas e Inconvenientes Las fotocélulas de reflexión sobre objeto se componen únicamente de un emisor y un receptor montados bajo una misma carcasa, por lo que el montaje es sencillo y rápido. En estas fotocélulas el haz de luz recorre dos veces la distancia de detección y además el objeto puede ser de reflectividad baja, por lo que sólo se consiguen distancias de detección pequeñas (por lo general menos de un metro Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Elementos de entrada analógicos Sensores inductivos Principio de funcionamiento Una corriente que circula a través de un hilo conductor, genera un campo magnético que está asociado a ella. Los sensores de proximidad inductivos contienen un devanado interno. Cuando una corriente circula por el mismo, un campo magnético es generado, que tiene la dirección determinada. Cuando un metal es acercado al campo magnético generado por el sensor de proximidad, éste es detectado. La bobina, o devanado, del sensor inductivo induce corrientes de Foucault en el material por detectar. Estas, a su vez, generan un campo magnético que se opone al de la bobina del sensor, causando una reducción en la inductancia de la misma. Esta reducción en la inductancia de la bobina interna del sensor, trae aparejado una disminución en la impedancia de ésta. La inductancia es un valor intrínseco de las bobinas o inductores, que depende del diámetro de las espiras y el número de ellas. En sistemas de corriente alterna, la reactancia inductiva se opone al cambio del sentido de la corriente. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) El oscilador podrá generar nuevamente el campo magnético con su amplitud normal. Es en este momento en que el circuito detector nuevamente detecta este cambio de impedancia y envía una señal al amplificador de salida para que sea éste quien, nuevamente, restituya el estado de la salida del sensor. Si el sensor tiene una configuración “Normal Abierta”, este activará la salida cuando el metal a detectar ingrese en la zona de detección. Lo opuesto ocurre cuando el sensor tiene una configuración "Normal Cerrada". Estos cambios de estado son evaluados por unidades externas tales como: PLCss, relés, PCs, etc. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Sensores blindados y no blindados La diferencia fundamental consiste en el blindaje o protección que tiene la forma constructiva del mismo, se detalla en el siguiente gráfico. Sensores blindados Los blindados tienen un agregado al núcleo y un blindaje metálico que limita el campo magnético al frente del sensor. Características: •Enrasables. •Especiales para posicionamiento. •Distancias más cortas de detección. •Sensado limitado al frente del sensor. Sensores no blindados Los no blindados no tienen blindaje extra, resultando en un área de sensado mayor. Características: •No enrasables. •Detección de presencia. •Distancias más grandes de detección. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Distancia de sensado La distancia de sensado (Sn) especificada en la hoja de datos de un sensor inductivo está basada en un objeto de estándar con medidas de 1" x 1" de hierro dulce. Este valor variará sensiblemente si se quiere detectar otros tipos de metales, incluso con materiales ferrosos como el acero inoxidable (SS). Para otros no ferrosos, como el aluminio, pueden ser detectados, pero a menores distancias. En el siguiente gráfico se puede ver como varía la distancia de detección en función del material a detectar y el tamaño del mismo. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Consideraciones especiales • La superficie del objeto a detectar no debe ser menor que el diámetro del sensor de proximidad (preferentemente 2 veces más grande que el tamaño o diámetro del sensor). Si fuera menor que el 50% del diámetro del sensor, la distancia de detección disminuye sustancialmente. • Debido a las limitaciones de los campos magnéticos, los sensores inductivos tienen una distancia de detección pequeña comparados con otros tipos de sensores. Esta distancia puede variar, en función del tipo de sensor inductivo, desde fracciones de milímetros hasta 40 mm en promedio. • Para compensar el limitado rango de detección, existe una extensa variedad de formatos de sensores inductivos: cilíndricos, chatos, rectangulares, etc. •Los sensores inductivos cilíndricos son los más usuales en las aplicaciones presentes en la industria. • Posibilidad de montar los sensores tanto enrasados como no enrasados. • Gracias a no poseer partes móviles los sensores de proximidad no sufren en exceso el desgaste. • Gracias a las especiales consideraciones en el diseño, y al grado de protección IP67, muchos sensores inductivos pueden trabajar en ambientes adversos, con fluidos corrosivos, aceites, etc., sin perder operatividad. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Normativa de protección Las normas referentes a los tipos o grados de protección son: NEMA TIPO 1: Propósito general. Envolvente destinada a prevenir de contactos accidentales con los aparatos. TIPO 2: Hermético a gotas. Previene contra contactos accidentales que pueden producirse por condensación de gotas o salpicaduras. TIPO 3: Resistencia a la intemperie. Para instalación en el exterior. TIPO 3R: Hermético a la lluvia. TIPO 4: Hermético al agua. Protege contra chorro de agua. TIPO 5: Hermético al polvo. TIPO 6: Sumergible en condiciones especificadas de presión y tiempo. TIPO 7: Para emplazamientos peligrosos Clase I. El circuito de ruptura de corriente actúa al aire. TIPO 8: Para emplazamientos peligrosos Clase I. Los aparatos están sumergidos en aceite. TIPO 9: Para emplazamientos peligroso Clase II y funcionamiento intermitente. TIPO 10: A prueba de explosión. TIPO 11: Resistente a ácidos o gases. TIPO 12: Protección contra polvo, hilos, fibras, hojas, rebose de aceite sobrante o refrigerante. TIPO 13: Protección contra polvo. Protege de contactos accidentales y de que su operación normal no se interfiera por la entrada de polvo Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Normativa de protección DIN La norma DIN 40 050 establece la grado de protección IP; éste se compone de dos dígitos: El primero indica la protección contra sólidos. El segundo indica la protección contra el agua. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Sensores inmunizados Debido al principio por el cual el sensor detecta a los elementos metálicos, los campos magnéticos, la presencia de campos magnéticos externos pueden provocar falsas detecciones o no detecciones, para evitarlo existen sensores inductivos con inmunidad a campos magnéticos variables, como los generados por máquinas de soldar que utilizan grandes flujos de corriente eléctrica. Estos sensores están principalmente fabricados sin núcleo de material ferromagnético, es decir el núcleo es de aire, a su vez, normalmente, están compuesto por dos bobinas en tándem o perpendiculares para trabajar con un diferencial eléctrico y no con el factor de calidad Q propio del sensor. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Elementos de entrada analógicos Fines de carrera También llamado sensor de contacto (también conocido como "interruptor de límite") o limitswitch, son dispositivos eléctricos, neumáticos o mecánicos situados al final del recorrido de un elemento móvil, como por ejemplo una cinta transportadora, con el objetivo de enviar señales que puedan modificar el estado de un circuito. Internamente pueden contener interruptores normalmente abiertos (NA o NO en inglés), cerrados (NC) o conmutadores dependiendo de la operación que cumplan al ser accionados, de ahí la gran variedad de finales de carrera que existen en mercado. Los finales de carrera están fabricados en diferentes materiales tales como metal, plástico o fibra de vidrio Descripción Generalmente estos sensores están compuestos por dos partes: un cuerpo donde se encuentran los contactos y una cabeza que detecta el movimiento. Su uso es muy diverso, empleándose, en general, en todas las máquinas que tengan un movimiento rectilíneo de ida y vuelta o sigan una trayectoria fija, es decir, aquellas que realicen una carrera o recorrido fijo, como por ejemplo ascensores, montacargas, robots, etc. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Funcionamiento Estos sensores tienen dos tipos de funcionamiento: modo positivo y modo negativo. En el modo positivo el sensor se activa cuando el elemento a controlar tiene una tara que hace que el eje se eleve y conecte el contacto móvil con el contacto NC. Cuando el muelle (resorte de presión) se rompe el sensor se queda desconectado. El modo negativo es la inversa del modo anterior, cuando el objeto controlado tiene un saliente que empuje el eje hacia abajo, forzando el resorte de copa y haciendo que se cierre el circuito. En este modo cuando el muelle falla y se rompe permanece activado. Ventajas e Inconvenientes Entre las ventajas encontramos la facilidad en la instalación, la robustez del sistema, es insensible a estados transitorios, trabaja a tensiones altas, debido a la inexistencia de imanes es inmune a la electricidad estática. Los inconvenientes de este dispositivo son la velocidad de detección y la posibilidad de rebotes en el contacto, además depende de la fuerza de actuación. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Modelos Dentro de los dispositivos sensores de final de carrera existen varios modelos: • Honeywellde seguridad: Este final de carrera está incorporado dentro de la gama GLS de la empresa Honeywell y se fabrica también en miniatura, tanto en metal como en plástico y madera, con tres conducciones metálicas muy compactas. • Fin de carrera para entornos peligrosos: Se trata en concreto de un microinterruptor conmutador monopolar con una robusta carcasa de aluminio. Esta cubierta ha sido diseñada para poder soportar explosiones internas y para poder enfriar los gases que la explosión genera en su interior. Este interruptor se acciona mediante un actuador de la palanca externo de rodillo que permite un ajuste de 360º. • Set crews: Estos tipos de finales de carrera se utilizan para prevenir daños en el sensor provocados por el objeto sensado. Están compuestos por un cilindro roscado conteniendo un resorte con un objetivo de metal el cual es detectado por el sensor inductivo por lo que puede soportar impactos de hasta 20 N sin sufrir daños. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Elementos de entrada analógicos Niveles Consta de un flotador pendiente del techo del depósito por una barra a través de la cual trasmite su movimiento a una ampolla de mercurio (la hace basculas) con un interruptor. Si el nivel alcanza al flotador lo empuja en sentido ascendente, elevándose si la fuerza de empuje supera al peso del flotador, este movimiento es trasmitido por la barra y el interruptor cambia de posición. La ampolla es de acero inoxidable no magnético. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Ventajas Estos instrumentos tienen una precisión de 0,5 %. Son adecuados en la medida de niveles en depósitos abiertos y cerrados. Son independientes del peso específico del fluido. Desventajas El flotador es susceptible a modificar su geometría o capacidad de flotación en la medida que reciba depósitos de sólidos propios del líquido en el que está sumergido. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Elementos de entrada analógicos Presóstatos El presóstato también es conocido como interruptor de presión. Es un aparato que cierra o abre un circuito eléctrico dependiendo de la lectura de presión de un fluido. Operación El fluido ejerce una presión sobre un pistón interno haciendo que se mueva hasta que se unen dos contactos. Cuando la presión baja un resorte empuja el pistón en sentido contrario y los contactos se separan. Un tornillo permite ajustar la sensibilidad de disparo del presóstato al aplicar más o menos fuerza sobre el pistón a través del resorte. Usualmente tienen dos ajustes independientes: la presión de encendido y la presión de apagado. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) No deben ser confundidos con los transductores de presión (medidores de presión), mientras estos últimos entregan una señal variable en base al rango de presión, los presóstato entregan una señal apagado/encendido únicamente. Tipos Los tipos de Presóstatos varían dependiendo del rango de presión al que pueden ser ajustados, temperatura de trabajo y el tipo de fluido que pueden medir. Usos Los usos son muy variados. Algunos ejemplos: la luz roja de falta de presión de aceite de un automóvil está conectada a un presóstato. La bomba de agua está controlada por un presostato en el sistema hidroneumático (hidráulico) de una casa. Los Presóstatos en general no tienen la capacidad para encender directamente el equipo que están controlando y se ayudan con un relevador o contactor eléctrico. El encendido del aire acondicionado de un coche también va determinado por un presostato. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Elementos de entrada analógicos Relés y contactores El relé o relevador es un dispositivo electromecánico. Funciona como un interruptor controlado por un circuito eléctrico en el que, por medio de una bobina y un electroimán, se acciona un juego de uno o varios contactos que permiten abrir o cerrar otros circuitos eléctricos independientes. Dado que el relé es capaz de controlar un circuito de salida de mayor potencia que el de entrada, puede considerarse, en un amplio sentido, como un amplificador eléctrico. Como tal se emplearon en telegrafía, haciendo la función de repetidores que generaban una nueva señal con corriente procedente de pilas locales a partir de la señal débil recibida por la línea. Se les llamaba "relevadores". De ahí "relé". Tipos de relés Existen multitud de tipos distintos de relés, dependiendo del número de contactos, de la intensidad admisible por los mismos, tipo de corriente de accionamiento, tiempo de activación y desactivación, etc. Cuando controlan grandes potencias se les llama contactores en lugar de relés. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Relés electromecánicos • Relés de tipo armadura: pese a ser los más antiguos siguen siendo lo más utilizados en multitud de aplicaciones. Un electroimán provoca la basculación de una armadura al ser excitado, cerrando o abriendo los contactos dependiendo de si es NA (normalmente abierto) o NC (normalmente cerrado). • Relés de núcleo móvil: a diferencia del anterior modelo estos están formados por un émbolo en lugar de una armadura. Debido a su mayor fuerza de atracción, se utiliza un solenoide para cerrar sus contactos. Es muy utilizado cuando hay que controlar altas corrientes. • Relé tipo reed o de lengüeta: están constituidos por una ampolla de vidrio, con contactos en su interior, montados sobre delgadas láminas de metal. Estos contactos conmutan por la excitación de una bobina, que se encuentra alrededor de la mencionada ampolla. • Relés polarizados o biestables: se componen de una pequeña armadura, solidaria a un imán permanente. El extremo inferior gira dentro de los polos de un electroimán, mientras que el otro lleva una cabeza de contacto. Al excitar el electroimán, se mueve la armadura y provoca el cierre de los contactos. Si se polariza al revés, el giro será en sentido contrario, abriendo los contactos ó cerrando otro circuito. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Relé de estado sólido Se llama relé de estado sólido a un circuito híbrido, normalmente compuesto por un optoacoplador que aísla la entrada, un circuito de disparo, que detecta el paso por cero de la corriente de línea y un triac o dispositivo similar que actúa de interruptor de potencia. Su nombre se debe a la similitud que presenta con un relé electromecánico; este dispositivo es usado generalmente para aplicaciones donde se presenta un uso continuo de los contactos del relé que en comparación con un relé convencional generaría un serio desgaste mecánico, además de poder conmutar altos amperajes que en el caso del relé electromecánico destruirían en poco tiempo los contactos. Estos relés permiten una velocidad de conmutación muy superior a la de los relés electromecánicos. Relé de corriente alterna Cuando se excita la bobina de un relé con corriente alterna, el flujo magnético en el circuito magnético, también es alterno, produciendo una fuerza pulsante, con frecuencia doble, sobre los contactos. Es decir, los contactos de un relé conectado a la red, en algunos lugares, como varios países de Europa y Latinoamérica oscilarán a 50 Hz y en otros, como en Estados Unidos lo harán a 60 Hz. Este hecho se aprovecha en algunos timbres y zumbadores, como un activador a distancia. En un relé de corriente alterna se modifica la resonancia de los contactos para que no oscilen. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Relé de láminas Este tipo de relé se utilizaba para discriminar distintas frecuencias. Consiste en un electroimán excitado con la corriente alterna de entrada que atrae varias varillas sintonizadas para resonar a sendas frecuencias de interés. La varilla que resuena acciona su contacto; las demás, no. Los relés de láminas se utilizaron en aeromodelismo y otros sistemas de telecontrol. Ventajas del uso de relés La gran ventaja de los relés electromagnéticos es la completa separación eléctrica entre la corriente de accionamiento, la que circula por la bobina del electroimán, y los circuitos controlados por los contactos, lo que hace que se puedan manejar altos voltajes o elevadas potencias con pequeñas tensiones de control. También ofrecen la posibilidad de control de un dispositivo a distancia mediante el uso de pequeñas señales de control. En el caso presentado podemos ver un grupo de relés en bases interface que son controlado por módulos digitales programables que permiten crear funciones de temporización y contador como si de un mini PLC (Circuito Lógico Programable) se tratase. Con estos modernos sistemas los relés pueden actuar de forma programada e independiente lo que supone grandes ventajas en su aplicación aumentando su uso en aplicaciones sin necesidad de utilizar controles como PLC's u otros medios para comandarlos. Se puede encender una bombilla o motor y al encenderlo se apaga el otro motor o bombilla. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Elementos de salidas analógicos Solenoides Relé Contactor Lámparas Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Elementos de salida analógicos Solenoides Un solenoide es cualquier dispositivo físico capaz de crear una zona de campo magnético uniforme. Un ejemplo teórico es el de una bobina de hilo conductor aislado y enrollado helicoidalmente, de longitud infinita. En ese caso ideal el campo magnético sería uniforme en su interior y, como consecuencia, fuera sería nulo. En la práctica, una aproximación real a un solenoide es un alambre aislado, de longitud finita, enrollado en forma de hélice (bobina) o un número de espirales con un paso acorde a las necesidades, por el que circula una corriente eléctrica. Cuando esto sucede, se genera un campo magnético dentro de la bobina tanto más uniforme cuanto más larga sea la bobina. La bobina con un núcleo apropiado, se convierte en un electroimán. Se utiliza en gran medida para generar un campo magnético uniforme. Este tipo de bobinas es utilizado para accionar un tipo de válvula, llamada válvula solenoide, que responde a pulsos eléctricos respecto de su apertura y cierre. Eventualmente controlable por programa, su aplicación más recurrente en la actualidad, tiene relación con sistemas de regulación hidráulica y neumática. El mecanismo que acopla y desacopla el motor de arranque de los motores de combustión interna en el momento de su puesta en marcha es un solenoide. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Elementos de salida analógicos Relés o contactores Un contactor es un componente electromecánico que tiene por objetivo establecer o interrumpir el paso de corriente, ya sea en el circuito de potencia o en el circuito de mando, tan pronto se energice la bobina (en el caso de ser contactores instantáneos). Un contactor es un dispositivo con capacidad de cortar la corriente eléctrica de un receptor o instalación, con la posibilidad de ser accionado a distancia, que tiene dos posiciones de funcionamiento: una estable o de reposo, cuando no recibe acción alguna por parte del circuito de mando, y otra inestable, cuando actúa dicha acción. Este tipo de funcionamiento se llama de "todo o nada". En los esquemas eléctricos, su simbología se establece con las letras KM seguidas de un número de orden. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Elementos de salida analógicos Lámparas señalización Consta de un filamento de wolframio muy fino, encerrado en una ampolla de vidrio en la que se ha hecho el vacío, o se ha rellenado con un gas inerte, para evitar que el filamento se volatilice por las altas temperaturas que alcanza. Se completa con un casquillo metálico, en el que se ubican las conexiones eléctricas. La ampolla varía de tamaño con la potencia de la lámpara, puesto que la temperatura del filamento es muy alta y, al crecer la potencia y el desprendimiento de calor, es necesario aumentar la superficie de enfriamiento. Inicialmente en el interior de la ampolla se hacía el vacío. Actualmente la ampolla está rellena de algún gas noble (normalmente kriptón) que impide la combustión del filamento. El casquillo sirve también para fijar la lámpara en un portalámparas por medio de una rosca (llamada Rosca Edison) o una bayoneta. En casi todo el mundo los casquillos de rosca para lámparas de potencias medias se designan con el código de roscas Edison E-27, representando este número la medida en milímetros de su rosca. Es también muy frecuente una talla menor de rosca, la llamada E-14, o rosca Mignon, y casi desaparecida la llamada Goliath, E-45, reservada para lámparas de grandes potencias. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Elementos de entrada analógicos Termocuplas Sensores capacitivos Celda de carga Encoder Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Elementos de entrada analógicos Termocuplas Un termopar (también llamado termocupla) es un transductor formado por la unión de dos metales distintos que produce un voltaje (efecto Seebeck), que es función de la diferencia de temperatura entre uno de los extremos denominado "punto caliente" o unión caliente o de medida y el otro denominado "punto frío" o unión fría o de referencia. En Instrumentación industrial, los termopares son ampliamente usados como sensores de temperatura. Son económicos, intercambiables, tienen conectores estándar y son capaces de medir un amplio rango de temperaturas. Su principal limitación es la exactitud ya que los errores del sistema inferiores a un grado Celsius son difíciles de obtener. El grupo de termopares conectados en serie recibe el nombre de termopila. Tanto los termopares como las termopilas son muy usados en aplicaciones de calefacción a gas. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Tipos de termopares • Tipo K (Cromo (Ni-Cr) Chromel / Aluminio (aleación de Ni -Al) Alumel): con una amplia variedad de aplicaciones, está disponible a un bajo costo y en una variedad de sondas. Tienen un rango de temperatura de -200º C a +1.372º C y una sensibilidad 41µV/° C aprox. Posee buena resistencia a la oxidación. • Tipo E (Cromo / Constantán (aleación de Cu-Ni)): No son magnéticos y gracias a su sensibilidad, son ideales para el uso en bajas temperaturas, en el ámbito criogénico. Tienen una sensibilidad de 68 µV/° C. • Tipo J (Hierro / Constantán): Su rango de utilización es de -270/+1200°C. Debido a sus características se recomienda su uso en atmósferas inertes, reductoras o en vacío, su uso continuado a 800°C no presenta problemas, su principal inconveniente es la rápida oxidación que sufre el hierro por encima de 550°C y por debajo de 0°C es necesario tomar precauciones a causa de la condensación de vapor de agua sobre el hierro. • Tipo T (Cobre / Constantán): ideales para mediciones entre -200 y 260 °C. Resisten atmósferas húmedas, reductoras y oxidantes y son aplicables en criogenia. El tipo termopares de T tiene una sensibilidad de cerca de 43 µV/°C. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Tipos de termopares . • Tipo N (Nicrosil (Ni-Cr-Si / Nisil (Ni-Si)): es adecuado para mediciones de alta temperatura gracias a su elevada estabilidad y resistencia a la oxidación de altas temperaturas, y no necesita del platino utilizado en los tipos B, R y S que son más caros. Por otro lado, los termopares tipo B, R y S son los más estables, pero debido a su baja sensibilidad (10 µV/° C aprox.) generalmente son usados para medir altas temperaturas (superiores a 300º C). • Tipo B (Platino (Pt)-Rodio (Rh)): son adecuados para la medición de altas temperaturas superiores a 1.800º C. Los tipo B presentan el mismo resultado a 0º C y 42º C debido a su curva de temperatura/voltaje, limitando así su uso a temperaturas por encima de 50º C. • Tipo R (Platino (Pt)-Rodio (Rh)): adecuados para la medición de temperaturas de hasta 1.300º C. Su baja sensibilidad (10 µV/° C) y su elevado precio quitan su atractivo. • Tipo S (Platino / Rodio): ideales para mediciones de altas temperaturas hasta los 1.300º C, pero su baja sensibilidad (10 µV/° C) y su elevado precio lo convierten en un instrumento no adecuado para el uso general. Debido a su elevada estabilidad, el tipo S es utilizado para la calibración universal del punto de fusión del oro (1064,43° C). Los termopares con una baja sensibilidad, como en el caso de los tipos B, R y S, tienen además una resolución menor. La selección de termopares es importante para asegurarse que cubren el rango de temperaturas a determinar. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Precauciones y consideraciones al usar termopares La mayor parte de los problemas de medición y errores con los termopares se deben a la falta de conocimientos del funcionamiento de los termopares. A continuación, un breve listado de los problemas más comunes que deben tenerse en cuenta. Problemas de conexión La mayoría de los errores de medición son causados por uniones no intencionales del termopar. Se debe tener en cuenta que cualquier contacto entre dos metales distintos creará una unión. Si lo que se desea es aumentar la longitud de las guías, se debe usar el tipo correcto del cable de extensión. Así por ejemplo, el tipo K corresponde al termopar K. Al usar otro tipo se introducirá una unión termopar. Cualquiera que sea el conector empleado debe estar hecho del material termopar correcto y su polaridad debe ser la adecuada. Lo más correcto es emplear conectores comerciales del mismo tipo que el termopar para evitar problemas. Resistencia de la guía Para minimizar la desviación térmica y mejorar los tiempos de respuesta, los termopares están integrados con delgados cables. Esto puede causar que los termopares tengan una alta resistencia, la cual puede hacer que sea sensible al ruido y también puede causar errores debidos a la resistencia del instrumento de medición. Una unión termopar típica expuesta con 0,25 mm tendrá una resistencia de cerca de 15 ohmios por metro. Si se necesitan termopares con delgadas guías o largos cables, conviene mantener las guías cortas y entonces usar el cable de extensión, el cual es más grueso, (lo que significa una menor resistencia) ubicado entre el termopar y el instrumento de medición. Se recomienda medir la resistencia del termopar antes de utilizarlo. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Descalibración La descalibración es el proceso de alterar accidentalmente la conformación del cable del termopar. La causa más común es la difusión de partículas atmosféricas en el metal a los extremos de la temperatura de operación. Otras causas son las impurezas y los químicos del aislante difundiéndose en el cable del termopar. Si se opera a elevadas temperaturas, se deben revisar las especificaciones del aislante de la sonda. Tenga en cuenta que uno de los criterios para calibrar un instrumento de medición, es que el patrón debe ser por lo menos 10 veces más preciso que el instrumento a calibrar. Ruido La salida de un termopar es una pequeña señal, así que es susceptible de error por ruido eléctrico. La mayoría de los instrumentos de medición rechazan cualquier modo de ruido (señales que están en el mismo cable o en ambos) así que el ruido puede ser minimizado al retorcer los cables para asegurarse que ambos recogen la misma señal de ruido. Si se opera en un ambiente extremadamente ruidoso, (Ej.: cerca de un gran motor), es necesario considerar usar un cable de extensión protegido. Si se sospecha de la recepción de ruido, primero se deben apagar todos los equipos sospechosos y comprobar si las lecturas cambian. Sin embargo, la solución más lógica es diseñar un filtro pasabajas (resistencia y condensador en serie) ya que es probable que la frecuencia del ruido (por ejemplo de un motor) sea mucho mayor a la frecuencia con que oscila la temperatura. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Voltaje en Modo Común Aunque las señales del termopar son muy pequeñas, a la salida del instrumento de medición pueden aparecer voltajes mayores. Estos voltajes pueden ser causados tanto por una recepción inductiva (un problema cuando se mide la temperatura de partes del motor y transformadores) o por las uniones a conexiones terrestres. Un ejemplo típico de uniones a tierra sería la medición de un tubo de agua caliente con un termopar sin aislamiento. Si existe alguna conexión terrestre pueden existir algunos voltios entre el tubo y la tierra del instrumento de medición. Estas señales están una vez más en el modo común (las mismas en ambos cables del termopar) así que no causarán ningún problema con la mayoría de los instrumentos siempre y cuando no sean demasiado grandes. Los voltajes del modo común pueden ser minimizados al usar los mismos recaudos del cableado establecidos para el ruido, y también al usar termopares aislados. Ruido en modo serie Si el sensor esta expuesto a cables de alta tensión se puede presentar un voltaje que aparece en solo una de las líneas de este, este ruido se puede disminuir transmitiendo la señal en corriente. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Desviación térmica Al calentar la masa de los termopares se extrae energía que afectará a la temperatura que se trata determinar. Considérese por ejemplo, medir la temperatura de un líquido en un tubo de ensayo: existen dos problemas potenciales. El primero es que la energía del calor viajará hasta el cable del termopar y se disipará hacia la atmósfera reduciendo así la temperatura del líquido alrededor de los cables. Un problema similar puede ocurrir si un termopar no está suficientemente inmerso en el líquido, debido a un ambiente de temperatura de aire más frío en los cables, la conducción térmica puede causar que la unión del termopar esté a una temperatura diferente del líquido mismo. En este ejemplo, un termopar con cables más delgados puede ser útil, ya que causará un gradiente de temperatura más pronunciado a lo largo del cable del termopar en la unión entre el líquido y el aire del ambiente. Si se emplean termopares con cables delgados, se debe prestar atención a la resistencia de la guía. El uso de un termopar con delgados cables conectado Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Elementos de entrada analógicos Sensores capacitivos Principio de funcionamiento Los sensores capacitivos (KAS) reaccionan ante metales y no metales que al aproximarse a la superficie activa sobrepasan una determinada capacidad. La distancia de conexión respecto a un determinado material es tanto mayor cuanto más elevada sea su constante dieléctrica. Funcionamiento Desde el punto de vista puramente teórico, se dice que el sensor está formado por un oscilador cuya capacidad la forman un electrodo interno (parte del propio sensor) y otro externo (constituido por una pieza conectada a masa). El electrodo externo puede estar realizado de dos modos diferentes; en algunas aplicaciones dicho electrodo es el propio objeto a sensar, previamente conectado a masa; entonces la capacidad en cuestión variará en función de la distancia que hay entre el sensor y el objeto. En cambio, en otras aplicaciones se coloca una masa fija y, entonces, el cuerpo a detectar utilizado como dieléctrico se introduce entre la masa y la placa activa, modificando así las características del condensador equivalente. Aplicaciones Estos sensores se emplean para la identificación de objetos, para funciones contadoras y para toda clase de controles de nivel de carga de materiales sólidos o líquidos. También son utilizados para muchos dispositivos con pantalla táctil, como teléfonos móviles, ya que el sensor percibe la pequeña diferencia de potencial entre membranas de los dedos eléctricamente polarizados de una persona adulta. Dirección de Educación de Adultos y formación Profesional
Automatización industrial por lógica programada (PLC) Detección de nivel En esta aplicación, cuando un objeto (líquidos, granulados, metales, aislantes, etc.) penetra en el campo eléctrico que hay entre las placas sensor, varía el dieléctrico, variando consecuentemente el valor de capacitancia. Sensor de humedad El principio de funcionamiento de esta aplicación es similar a la anterior. En esta ocasión el dieléctrico, por ejemplo el aire, cambia su permitividad con respecto a la humedad del ambiente. Detección de posición Esta aplicación es básicamente un condensador variable, en el cual una de las placas es móvil, pudiendo de esta manera tener mayor o menor superficie efectiva entre las dos placas, variando también el valor de la capacitancia, y también puede ser usado en industrias químicas. pero como sabemos este tipo de aplicación no suele ser lo correcto Dirección de Educación de Adultos y formación Profesional