Steady State Error in Feedback Control
190 likes | 238 Vues
Learn about open-loop and closed-loop control systems, feedback mechanisms, error analysis, and practical tips to improve system performance. Discover ways to integrate sensors like encoders, potentiometers, and Hall effect sensors for precise control. Explore methods to reduce static errors and enhance overall system stability.

Steady State Error in Feedback Control
E N D
Presentation Transcript
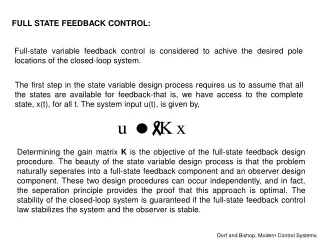
Steady State Error inFeedback Control David Giandomenico Team mentor for Lynbrook Robotics – FIRST #846 <DGiandomenico@LynbrookRobotics.com>
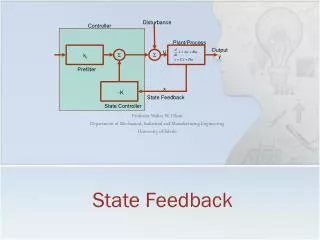
InputSpeed or Position (joystick, preset button, autonomous, etc.) + Out + G E.S.C. − − Open-Loop Control System
Simple SystemNo Feedback – “Open Loop” H In H Out CPU+ESC+Motor+Robot
System Error In Out
Feedback System“Closed Loop” H + A Out In S Error = ( In – Out) − CPU ESC + Motor + Robot
Feedback System“Closed Loop” A H + Out In S Error = ( In-Out) − CPU ESC + Motor + Robot
Error in Feedback System A + Out In S Error = ( In-Out) − CPU ESC + Motor + Robot
Feedback System w/Feed Forward ESC + Motor + Robot H + In Out (Velocity) S − A CPU Error = (Out – In) S − +
Feedback Systemw/Feed Forward + H − A Out S S − In Error = ( Out-In) + CPU ESC + Motor + Robot
Feedback Systemw/Feed Forward In + − H A Out S S − Error = (Out-In) + CPU ESC + Motor + Robot
Static Error in Feedback Systemw/Feed Forward In + − H A Out S S − Error = (Out-In) + CPU ESC + Motor + Robot
Steady State Error inFeedback Control David Giandomenico Team mentor for Lynbrook Robotics – FIRST #846 <DGiandomenico@LynbrookRobotics.com>
Error in System In H Out
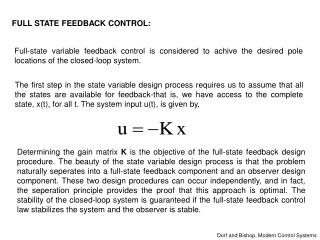
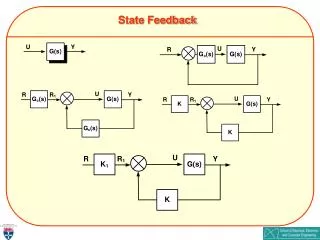
Feedback System“Closed Loop” + In G Out − H
Tip: Setting Gain Fast Option 1: Recompile and upload. Bleah! Option 2: Attach a potentiometer to an analog input (once adjusted, hardwire in code). Not Bad! Option 3: Use EEPROM/Flash Memory to save values. Access values through Operator Interface buttons. Display values on robot or OI. Way Cool!
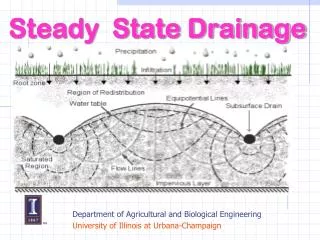
Simple Speed and Position Test Setup Neodymium MagnetQty 2, for balance.(see the web, eBay!) Custom disk with holes for shaft and magnets Hall effect magnetic sensor<$2 at digikey or mouser R/C Hobby Prop Adapter, 1/8”
+ InputSpeed or Position (joystick, preset button, autonomous, etc.) + G Out E.S.C. − − SensorPotentiometer, Encoder,Gear Tooth Sensor, Hall effect Sensor, … Closed-Loop Control System • Yet more sensors: • Accelerometers & GyrosOptical Distance Meas.Cameras,Ultrasonic: