Robot Actuators and Their Applications
Explore the different types of actuators used in robots, including hydraulic and pneumatic, to create mechanical movement. Learn about their components, advantages, and disadvantages in this informative guide. Discover the various applications and consider the best options for your robot projects.


Robot Actuators and Their Applications
E N D
Presentation Transcript
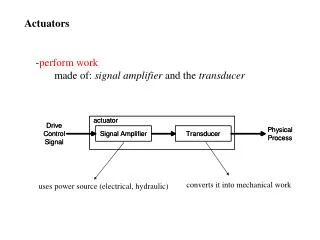
Actuators for Robots Actuators are used in order to produce mechanical movement in robots. Slides from Braunl and Jussi Suomela HUT/Automation
Not only electrical actuators • Pneumatic • Hydraulic • chemical
Hydraulic and Pneumatic Motors • Pneumatic Power - Air-powered cylinders • Compressed air • Either stored on board or injected by a pump • Produces linear motion through activation of cylinders • Hydraulic Power - Fluid (non-air)-powered cylinders • Uncompressible fluid, most often oil. • Requires a pump to generate the pressure and flow rate needed. • Complex and difficult to build effectively, and costly.
Hydraulic and Pneumatic Motors Piston rod Air Inlet Retracted Mechanical Stops Double Acting Cylinder Double Acting Cylinders Air Inlet Extended Extension limit Stroke
Pneumatic Actuators HUT/Automation
Pneumatic Devices It is very similar to hydraulic system, but power-to-weight ratio is much lower than hydraulic system. Because the air is compressible, it compressed and deforms under load.
Pneumatic Actuators • like hydraulic except power from compressed air • fast on/off type tasks • big forces with elasticity • no leak problems HUT/Automation
Compressed air Compressed air Single Action Cylinder Double Action Cylinder
Hydraulic Actuators HUT/Automation
When we use liquid as the fluid, we call it a hydraulics system
Hydraulic Actuators Components and Properties • linear movement • big forces without gears • actuators are simple • in mobile machines • Bad efficiency • motor, pump, actuator combination is lighter than motor, generator, battery, motor & gear combination HUT/Automation
Hydraulic Valves • servo valves • complicated structure, expensive • good control • proportional valves • simple, cheap • robust • more difficult to control • Digital hydraulics, new! • several fast on/off valves (2n) • digital control of the flow HUT/Automation
Double acting piston: Hydraulic actuators: cylinders Single acting: work can be done only in one direction Work is done in both directions Plunger Cylinder types: Piston rod on both sides Piston Tandem Fast moving Telescopic Telescopic Fast moving Hydraulic and Pneumatic Systems
Servo Valve HUT/Automation
Advantages of Hydraulic Actuators Hydraulic Actuator offers: • a high power-to-weight ratio , • large forces at low speeds • compatibility with microprocessor • tolerance of extreme hazardous environments. torque where, • Ais the effective area of the piston, • pis the working pressure.
A simple hydraulic system can be made out of syringes and aquarium tubing
Click the two links below to see some simple but effective hydraulic systems in action:http://www.youtube.com/watch?v=VFje0G69ku8&feature=relatedhttp://www.youtube.com/watch?feature=endscreen&v=vsF95qA1x7I&NR=1
For ideas on building a linear actuator with a motor and some PVC, check out this link:http://blog.davidjbarnes.com/2009/03/making-linear-actuator-for-robots.html
Other Actuators • piezoelectric • magnetic • ultra sound • SMA • inertial HUT/Automation
Comparison of various Actuators HUT/Automation
Advantages and Disadvantages of Electric Actuators (DC motor and stepper motor)
Practically • In this class we will use only servos • In past we used DC motors with H-bridge, pneumatic actuators, nintinol wires and hydraulic actuators. • So far, if you want to build rather small robots and you want to concentrate on intelligence and sensing, RC servos are the best choice. Many new types arrive every year, from very small to big powerful ones. Look to internet. • We will learn about some new actuators if time will allow at the end of the class.
What did we learn? • Feedback control is a fundament of robot control • Various kits (Lego Dacta Control Lab) have several demonstrations and project to explain the principles of feedback: • Line following • Speed control • Temperature control (fan, lamp, sensor)
What did we learn? • Control of Many DOF robots is tough • In addition to classical and modern control theory we use: • fuzzy control • genetic algorithms • neural control • bio-mimetic systems • Review your control knowledge (for next quarter), but remember that in this class all knowledge is through programming
Your task • Learn about the particular servo that you plan to use. If the servo was not suggested by the professor, learn about servos that are available, calculate your project requirements for a servo and pick one. Ask Bryce to order for you. The more servos we order, the cheaper the price of one. • If you do not want to use one of standard servos, your choices are: • build your own servo from a DC motor. This is a big project by itself and you must have clear reasons to do so • Use AC motor. Only for big robots. The same as above. • Use stepper motor. Remember that they are slow and weak, why you want to use them? You must be sure of your reasons
Your task • Use hydraulic control. Why? You need to purchase or build your own actuator. Think about redesigning our horse leg with better syringes and oil instead of water. How can you connect the syringe to a stepper motor? • Use pneumatic control. Read first the documentation of pneumatic hand or old Electric Horse. Talk to designers. • Find pistons in Mondo-Tronics or other robot store. They are good. • Use Nintinol or other similar actutors. They are good for face muscles or similar small and weak movements. • Can they be used for a hexapod? I doubt, but try to convince me • Before you do this, read the two-volume book of Conrad and Mills
Sources • Braunl • Jussi Suomela HUT/Automation