Question Set 3 – Inverse Kinematics
150 likes | 548 Vues
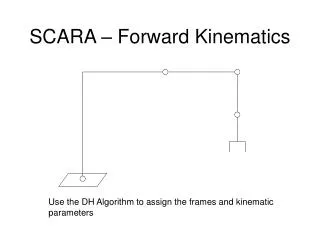
Question Set 3 – Inverse Kinematics. PPR. Given 0 (z 3 , y 3 , α 3 ) and frame {0}, perform the following tasks: Attach frames {1}, {2}, and {3} to the robot Draw (d 1 , d 2 , 3 ) on the figure Find ( d 1 , d 2 , 3 ) as the function of 0 (z 3 , y 3 , α 3 ) . 0 (z 3 , y 3 ). L 2.

Question Set 3 – Inverse Kinematics
E N D
Presentation Transcript
PPR • Given 0(z3, y3, α3) and frame {0}, perform the following tasks: • Attach frames {1}, {2}, and {3} to the robot • Draw (d1, d2, 3) on the figure • Find (d1, d2, 3) as the function of 0(z3, y3, α3) 0(z3, y3) L2 α3 y0 z0 x0
PPR • Given 0(z3, y3, α3) and frame {0}, perform the following tasks: • Attach frames {1}, {2}, and {3} to the robot • Draw (d1, d2, 3) on the figure • Find (d1, d2, 3) as the function of 0(z3, y3, α3) Z2 x3 0(z3, y3) L2 3 α3 x2 y0 Z3 d2 Z0,1 x0 x1 d1
PPR • Given 0(z3, y3, α3) and frame {0}, perform the following tasks: • Attach frames {1}, {2}, and {3} to the robot • Draw (d1, d2, 3) on the figure • Find (d1, d2, 3) as the function of 0(z3, y3, α3) Z2 x3 0(z3, y3) L2 3 α3 x2 y0 Z3 d2 Z0,1 x0 x1 d1
RPR Robot • Given 0(x3, y3, α3) and frame {0}, perform the following tasks: • Attach frames {1}, {2}, {3} to the robot • Draw (1, d2, 3) on the figure • Find (1, d2, 3) as the function of 0(x3, y3, α3) L2 0(x3, y3) α3 y0 γ 3 1 x0
RPR • Given 0(x3, y3, α3) and frame {0}, perform the following tasks: • Attach frames {1}, {2}, and {3} to the robot • Draw (1, d2, 3) on the figure • Find (1, d2, 3) as the function of 0(x3, y3, α3) Z2 x3 L2 0(x3, y3) x2 α3 y0 γ 3 Z3 d2 90+1 φ Z0,1 x0 -1 x1
RPR • Given 0(x3, y3, α3) and frame {0}, perform the following tasks: • Attach frames {1}, {2}, and {3} to the robot • Draw (1, d2, 3) on the figure • Find (1, d2, 3) as the function of 0(x3, y3, α3) Z2 x3 L2 0(x3, y3) x2 α3 y0 γ 3 Z3 d2 90+1 φ Z0,1 x0 -1 x1