Harmonic Averaging for Local Sensors: Reducing Bias in Travel Time Measurements
70 likes | 157 Vues
Utilize harmonic averaging with local sensors to reduce bias in travel time measurements caused by differences in instantaneous space mean, time, and harmonic mean speeds. Ensure accurate data from measured vehicle trajectories over a section to address strong bias related to measurement location.

Harmonic Averaging for Local Sensors: Reducing Bias in Travel Time Measurements
E N D
Presentation Transcript
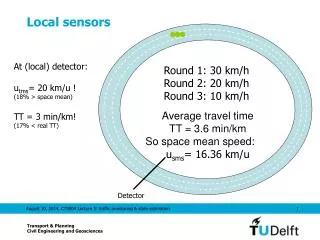
Local sensors At (local) detector: utms= 20 km/u ! (18% > space mean) TT = 3 min/km! (17% < real TT) Round 1: 30 km/h Round 2: 20 km/h Round 3: 10 km/h Average travel time TT = 3.6 min/km So space mean speed: usms= 16.36 km/u Detector
Local sensors At detector after 1 hour: utms= 23 km/u ! (17% > space mean) TT = 2.6 min/km! (14% < real TT) Red car: 30 km/u Yellow car: 20 km/u Blue car: 10 km/u After 1 hour: TT = 3 min/km thus usms=20 km/u ! Detector
Yes it matters: time mean induces serious bias (speeds) • Difference instantaneous space mean, time and harmonic mean • Data from measured vehicle trajectories (over a section) • Differences in speeds > 100%! • Strongly related to measurement location • Proportional to variance in individual speeds
Yes it matters: time mean induces serious bias (also in estimated travel times) Measured travel time Estimated travel time (harmonic mean speed) Estimated travel time (Time mean speed)
Solution: harmonic averaging local quantities • Average of quantity z over space: • Fill in z = v (speed) and you get
Relevance harmonic averaging • Most ITS need the space mean of a quantity: unbiased proxy with harmonic average (premise: stationarity and homogeneity) • Continuity relation: q = ku; density from flow and speed: k = q/u • Only valid with space mean speed (thus harmonic local mean!) • Differences (estimated and real density) up to 100% and more