Analysis of Subsurface Scattering under Generic Illumination
170 likes | 384 Vues
ICPR2008. Analysis of Subsurface Scattering under Generic Illumination. Y. Mukaigawa K. Suzuki Y. Yagi Osaka University, Japan. Camera. Light. Subsurface Scattering. Peers et al. SIGGRAPH2006. Light scattering in translucent media. Opaque. Translucent. Subsurface scattering. Camera.

Analysis of Subsurface Scattering under Generic Illumination
E N D
Presentation Transcript
ICPR2008 Analysis of Subsurface Scatteringunder Generic Illumination Y. Mukaigawa K. Suzuki Y. Yagi Osaka University, Japan
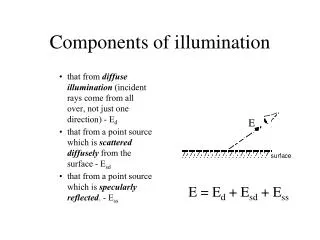
Camera Light Subsurface Scattering Peers et al.SIGGRAPH2006 • Light scattering in translucent media Opaque Translucent Subsurface scattering Camera Light BRDF: BSSRDF: Bidirectional Reflectance Distribution Function Bidirectional Scattering Surface Reflectance Distribution Function
Translucent objects • Typical translucent object • marble, milk, and skin • Actually, many objects in our living environment are also translucent. egg milk One of the reasons that many photometric analyzing methods do not work well in our living environment is they cannot treat the subsurface scattering. vegetable skin candle fruit plastic paper soap marble cloth
Related work • BSSRDF measurement using special lighting devices Laserbeam [Goesele et al.SIGGRAPH2004] Fiber optic spectrometer [Weirich et al.SIGGRAPH2006 ] Projector [Tariq et al.VMV2006] Projector [Peers et al.SIGGRAPH2006] Measurement under strictly controlled illumination
Our goal • Analysis of subsurface scattering under generic illumination Inputs: single image, 3-D shape, illumination Outputs: reflectance properties • Inverse rendering of translucent object Known Unknown rendering reflectance properties inverse rendering 3-D shape illumination image
R(d) Apple (σs=2.29,σa=0.003) 0.1 0.01 d 0.001 Skin (σs=0.74,σa=0.032) xi xo 0.0001 2 4 8 6 d [mm] Example of R(d) Dipole Model for BSSRDF (Jensen et al.SIGGRAPH2001) • Decomposition of the BSSRDF into • Fresnel functions: Ft(h, w) • Diffuse subsurface reflectance: R(d) • R(d) is the function of the distance d between xi and xo. • Including two inherent parameters of the material • scattering coefficient: ss • absorption coefficient: sa
R(d) estimatedR(d) dipole model fitting d Flow of the proposed method Additional information + Inputs: 1. Estimating R(d) for several distancesd. 2. Fitting of the dipole model. Outputs: two parameters • scattering coefficient ss. • absorption coefficient sa. Single image 3-D shape Illumination Camera parameters
known unknown known irradiance radiance ck lj djk Pk Pj R(d) R(djk) d d'1 d'2 d'3 d'4 d'5 Formulation and solution • Divide object surfaces into m small patches P1,P2,..., Pm. • Radiance ljof the patch Pj is formulated by • Quantization of the distances djk. by n discrete distances d'1, d'2,...,d'n. • Calculate only R'1, R'2,..., R'n. • Linear solution, if n < m. Ill-posed problem m2unknowns > m constraints
R(d) R'i R(d) d d'1 d'2 d'3 d'4 d'5 Model fitting • Dipole model fitting to the estimated R'i • Estimation of • scattering coefficient ss • absorption coefficient sa Discrete estimation • R'1, ..., R'n for the quantized distances d'1, ..., d'n Continuousestimation • R(d) for every distanced
Simulated scene • Evaluate how the quantization of the distance affects the accuracy of the estimated parameters. • Parameter estimation • finding the best parameter set that minimizes the error parameters ss=2.19 sa=0.002 h=1.3 Rendered image Illumination http://www.debevec.org/Probes/ Range and step of the parameters.
50 40 30 20 10 0 0.00 0.10 0.20 0.30 0.40 0.50 Results of parameter estimation unstable sampling small best PSNR(dB) best quantization (mm) large inaccurate Estimated parameters and the PSNRs
Dipole model fitting • The parametric model of R(d) R(d) EstimatedR(d) 10-1 input image 10-2 Ground truth ss=2.19 sa=0.002 10-3 10-4 ss=2.34 sa=0.009 Estimated model regenerated image (PSNR 47.9dB) 10 0 2 4 6 8 d(mm)
Real scene PP PE POM • Evaluate the stability • 3 materials: • Polypropylene (PP) • Polyethylene (PE) • Polyoxymethylene (POM) • 2 shapes: • Cube • Pyramid (with base) • 2 illuminations: • Left and right directions. • In total, 12 images (3x2x2) Target objects Camera Light source Target object Environment for image capture
Input images (3 materials x 2 shapes x 2 illuminations) Cube Pyramid Right Left Right Left PP PE POM
sa 0010 POM PP 0008 0006 0004 PE 0002 ss 0 1 2 3 R(d) PP R(d) 10-1 POM 10-2 10-3 PE 10-4 8 10 0 2 4 6 d [mm] Estimated parameters • Parameters for each material • Similar parameters for each material except for some outliers. • ss of the cube under right illumination is always outlier. • Averaged parameters • R(d) for each material PP PE POM Rendered images using estimated parameters
Conclusion • A new method to analyze subsurface scattering from a single image taken under generic illumination • Linear solution by quantizing the distance between patches. • Parameter estimation by fitting dipole model. • Future works • improvement of stability and accuracy The first step of the inverse rendering for translucent objects.