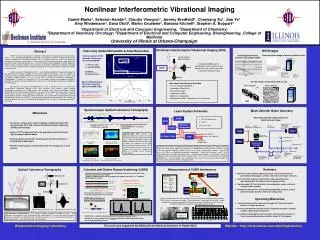
VIBRATIONAL GASTROINTESTINAL MICROROBOTICS
VIBRATIONAL GASTROINTESTINAL MICROROBOTICS. Research by Michael Nye. The Project. The problem The solution The process. Introduction. Traditionally, capturing pictures of your GI tract means one of two things: Endoscopes on a long line that is manually manipulated

VIBRATIONAL GASTROINTESTINAL MICROROBOTICS
E N D
Presentation Transcript
VIBRATIONAL GASTROINTESTINAL MICROROBOTICS Research by Michael Nye
The Project The problem The solution The process
Introduction • Traditionally, capturing pictures of your GI tract means one of two things: • Endoscopes on a long line that is manually manipulated • A pill that lets the body do the moving
Endoscopes • A wire is manually inserted into the body with an eyepiece or camera on the end • Lower resolution • Uncomfortable
Pill cameras • A small pill, ingested orally • Slow to gather footage • No fine control
Engineering goal • This project is a proof of concept. The goal is to demonstrate: • A robot can move using only vibration • A device can control the direction a robot moves in • All of this could be fit into a pill form factor
Step 1: Design and fabrication • A simple platform was designed that would allow for the most flexibility in testing • Several skiffs were constructed that fit into this test platform • Intended to limit movement to one direction
Step 2: Testing • Test platform was hooked up to a power supply, and 2 different skiffs were tested • Observational data was collected • How the robot behaved – speed, direction, stability • Observations were then used to refine a 2nd gen
Step 2: Testing (continued) • 2nd generation was tested for: • Speed • Straight paths
The test surface • Even, paper surface • 9 inch-long track • Incremental marks along finish line
The Observations The skiffs The data
General observations • Pager motor’s speed matters • The device will naturally move in the direction the pager motor faces • The motor induces a spin in the device • The skiff must be rigid and sturdy
Skiff tests data table • Device timed over a 9 inch course • Data is the average of 10 runs each
The future The new designs The end goal
Analysis of observations • The motor takes control • None of the designs could move straight • Design moves itself forwards • Very practical design! • With a very small motor and low voltage, the robot could move forward fairly steadily • All that’s needed is something to keep the robot from drifting side to side
The Next Step • Adapting the test observations to make a pill shaped robot, powered by a pager motor • A pill with two pager motors – one facing forward, one facing backwards • This will allow it to travel in two directions – each motor will direct the device without assistance • Three rails that can extend from the sides of the pill • The rails allow the robot to get a stronger contact with the walls of the GI Tract – this will transfer the motion more smoothly • The rails should be able to extend and retract, in order to best contact with the walls
Bibliography Carlsson. "Sedation for Upper Gastrointestinal Endoscopy." Thieme eJournals 27. (1995): 240-243. Web. 2 Dec 2009. <http://www.thieme-connect.com/ejournals/abstract/endoscopy/doi/10.1055/s-2007-1005678>. Kovac. "“Video pill” may supplement standard endoscopy." British Medical Journal (2001). Web. 2 Dec 2009. <http://www.ncbi.nlm.nih.gov:80/pmc/articles/PMC1120972/>. Panescu. "An imaging pill for gastrointestinal endoscopy." Engineering in Medicine and Biology Magazine 24.4 (2005): 12-14. Web. 2 Dec 2009. <http://ieeexplore.ieee.org/xpl/freeabs_all.jsp?arnumber=1463383>. Ponsky. "Percutaneous endoscopic gastrostomy." Journal of Gastrointestinal Surgery 8.7 (2007): 901-904. Web. 2 Dec 2009. <http://www.springerlink.com/content/b28u23772528x84p/>. Tearney. "In Vivo Endoscopic Optical Biopsy with Optical Coherence Tomography." Science 276. (1997). Web. 2 Dec 2009. <http://www.sciencemag.org/cgi/content/abstract/276/5321/2037>.
Special thanks are owed to… Dr. Mark Rentschler, Mr. Levin Sliker, And the CU Boulder Mechanical Engineering Department for providing this opportunity.