Database di immagini e Sistemi BioMetrici
640 likes | 952 Vues
DB. I. Database di immagini e Sistemi BioMetrici. Alessandra Lumini & Loris Nanni. Database di immagini. La capacità di un IDB di rispondere efficacemente alle query che gli vengono sottoposte è vincolata dall’abilità nell’interpretare il contenuto delle immagini.

Database di immagini e Sistemi BioMetrici
E N D
Presentation Transcript
DB I Database di immagini e Sistemi BioMetrici Alessandra Lumini & Loris Nanni Metodi e strutture per la gestione di basi di immagini
Database di immagini La capacità di un IDB di rispondere efficacemente alle query che gli vengono sottoposte è vincolata dall’abilità nell’interpretare il contenuto delle immagini. Questa operazione viene svolta solitamente all’atto dell’inserimento delle immagini nel database (preprocessing) e la sua efficacia dipende dal dominio applicativo Immagine Digitale Risultati Numerici Dispositivo di memorizzazione Elaborazione numerica Conversione A/D Un databasedi immagini(IDB) è un sistema integrato per la memorizzazione di immagini e delle informazioni che le descrivono e ne permettono l’astrazione, l’indicizzazione e il reperimento in base alle caratteristiche e alle relazioni tra gli oggetti presenti in esse. Metodi e strutture per la gestione di basi di immagini
DBMS tradizionali Persone SELECT Cognome, PtrImm FROM Persone WHERE Sesso=‘F’ AND Età < 35 CF Cognome Sesso Età PtrImm M Rsscrl.. Rossi Carlo 25 1230 Csdpn.. M Casadei Pino 40 12A5 Bncann.. Bianchi Anna F 18 12EE Dispositivo di memorizzazione Query Alfanumerica DBMS Puntatore Immagine Risultato alfanumerico della query • Le immagini sono considerate appendici passive del database • Ogni immagine e’ etichettata manualmente con una label testuale che ne descrive il contenuto • La ricerca si basa sui tradizionali motori di ricerca testuale SVANTAGGI • Le parole non sempre sono efficaci per descrivere informazioni visuali • E’ praticamente impossibile descrivere forme e tessiture con le parole • Le descrizioni testuali sono soggettive (spesso dicono piu’ della persona che le ha usate che dell’immagine che dovrebbero descrivere) Metodi e strutture per la gestione di basi di immagini
IDBMS Persone SELECT Cognome, PtrImm FROM Persone WHERE PtrImm IS SIMILAR TO 12EE CF Cognome Sesso Età PtrImm M Rsscrl.. Rossi Carlo 25 1230 Query Visiva Csdpn.. M Casadei Pino 40 12A5 Bncann.. Bianchi Anna F 18 12EE Puntatore Immagine Dispositivo di memorizzazione DBMS Risultato alfanumerico della query • Supportano la ricerca basata su attributi visuali • Tecniche di pattern recognition e computer vision sono usate per estrarre i descrittori di contenuto • Le query sono formulate in modo visuale (con rappresentazioni pittoriche del contenuto da ricercare) La ricerca e’ operata sulla base di forme, immagini, colori, tessiture, relazioni spaziali... Metodi e strutture per la gestione di basi di immagini
Ricerca per contenuto Scelta delle informazioni pittoriche (feature) INSERIMENTO IMMAGINI NELL’ IDB Definizione di una misura di similarità Estrazione automatica delle feature Inserimento delle feature nel database RICERCA IMMAGINI NELL’ IDB Elaborazione dell’immagine fornita come esempio Ricerca di immagini simili Presentazione risultati Metodi e strutture per la gestione di basi di immagini
Le problematiche • Estrazione delle informazioni pittoriche: • efficaci descrittori di contenuto per forme, colori, tessiture e relazioni spaziali • descrittori invarianti, multi-risoluzione, semantici... • Definizione di distanze percettive • Le distanze tra descrittori di contenuto dovrebbero essere conformi con le distanze percepite dall’uomo • Definizione di un linguaggio di interrogazione • metafore di query e visualizzazione ? ? • Definizione delle strutture dati per l’indicizzazione • un confronto sequenziale delle immagini è possibile solo per piccoli database IDB Metodi e strutture per la gestione di basi di immagini
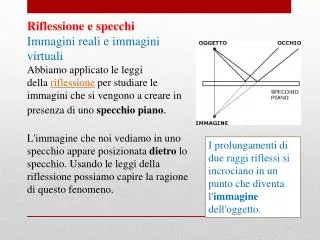
Il colore La luce e' una forma di energia chiamata energia radiante Il colore è l’effetto percepito quando un'onda elettromagnetica colpisce alcune strutture (coni e bastoncelli) del nostro sistema visivo. L’occhio percepisce la luce quando la lunghezza dell'onda e' compresa tra 350nm - 780nm (sopra si trovano gli infrarossi e sotto si trovano gli ultravioletti). Metodi e strutture per la gestione di basi di immagini
Spazi colorimetrici RGB. È un sistema additivo basato sulla teoria tricromatica del colore, usato comunemente nei monitor. Sfrutta una sintesi additiva delle tre componenti primarie, non e’ pertanto in grado di riprodurre tutti i colori visibili. blu ciano magenta verde giallo rosso nero (0,0,0) bianco (1,1,1) Isaac Newton teorizzò per la prima volta che la lunghezza d'onda visibile dell'intero spettro poteva essere suddivisa in tre bande di colore predominanti: Rosso, Verde e Blu (RGB= red, green, blue) che sono stati chiamati i colori primari. È possibile creare i colori dello spettro visibile attraverso una loro combinazione . L'occhio umano può percepire circa 10 milioni di diverse combinazioni Metodi e strutture per la gestione di basi di immagini
Spazi colorimetrici CMY(K) (Cyan Magenta Yellow (Black)) È un sistema sottrattivo usato in stampa e fotografia. La codifica CMYK di un colore è difficile da ottenere come corretta conversione da RGB. HSL (Hue Saturation Lightness) Questo spazio è stato studiato per riprodurre la percezione umana del colore. HUESi riferisce al nome del colore. SATURATIONSi riferisce alla forza del colore, o la sua posizione rispetto al grigio neutro. LUMINANCETermine usato per descrivere la differenza in intensita' di luce riflessa o trasmessa da un colore. giallo rosso verde magenta blu ciano nero (1,1,1) bianco (0,0,0) Metodi e strutture per la gestione di basi di immagini
Spazi colorimetrici Nel 1931 la Commission Internationale de l’Éclairage (CIE) ha definito il modello X,Y,Z che rappresenta tutti i colori visibili con sintesi additiva.La componente Y corrisponde alla luminosità. Diagramma di cromaticità =rappresentazione dei colori appartenenti al piano X+Y+Z = 1 A punti equidistandi sul diagramma di cromaticità nello spazio (X,Y,Z) non corrispondono colori ugualmente simili, CIELab. Sistema che classifica il colore mediante tre funzioni, che rappresentano la sensibilità di un osservatore standard alla luminosità di diverse lunghezze d’onda. È quasi lineare, indipendente dal dispositivo e uniforme (le distanze euclidee tra punti sono conformi alla distanza percepita) L: Luminanza a , b: Crominanza (a: verde-rosso, b: blu-giallo) Metodi e strutture per la gestione di basi di immagini
Istogrammi di colori Problemi • Difficoltà di indicizzazione • Sensibilità alle variazione di luminosità • Perdita delle informazioni spaziali • Difficoltà di effettuare confronti parziali Una volta definito un numero n di colori di riferimento, l’istogramma di una immagine e’ un vettore H di dimensione n tale che H[i] rappresenta la frazione di pixel con colore i° nell’immagine Per misurare la distanza tra due istogrammi H(I) e H(M) possono essere utilizzate ad esempio metriche indotte dalla norma 1 e 2 oppure l’intersezione di istogrammi: Metodi e strutture per la gestione di basi di immagini
Il colore: metodi locali • partizionamento fisso dell’immagine • se i blocchi sono piccoli si ha una inutile suddivisione di regioni a colore uniforme in tanti blocchi • se i blocchi sono grandi più regioni possono finire in un blocco • individuazione di regioni disgiunte uniformi • scelta degli spazi di colore: questi dovrebbero essere uniformi • criterio per la selezione del numero di cluster: troppi cluster generano eccessiva frammentazione; troppi pochi generano regioni non uniformi. split+merge La descrizione delle caratteristiche cromatiche locali di una immagine ha come obiettivo quello di rappresentare proprietà cromatiche di specifiche regioni nell’immagine. La segmentazione può avvenire in due modi: Una volta segmentata l’immagine ogni regione individuata può essere descritta in termini di: (area, baricentro, colore medio) Metodi e strutture per la gestione di basi di immagini
La forma • un punto di una immagine è detto di bordo se corrisponde ad una significativa variazione di intensità dell’immagine • un contorno è una lista ordinata di edge • edge linking è il processo che ha in ingresso una lista non ordinata di bordi e fornisce in uscita uno o più contorni La prima parte del processo di visione nell’uomo ha come scopo quello di identificare caratteristiche dell’immagine che siano utili per la stima della struttura e delle proprietà degli oggetti nella scena. Di fondamentale importanza a questo fine sono i bordi (edge). Gli approcci per la descrizione di forme, si distinguono in base all’informazione necessaria per estrarre il descrittore di forma: una immagine, i suoi bordi, il contorno di un oggetto Metodi e strutture per la gestione di basi di immagini
Codifica di contorni 0 0 • Il codice di Freeman (Chain Code):sequenza ordinata delle direzioni discrete (su un reticolo) da seguire per percorrere il contorno stesso. x 1 3 2 02322121 1 3 2 • Chain Code La curva è suddivisa in punti equidistanti si considerano i segmenti che uniscono punti adiacenti. • Ogni segmento viene descritto in termini di lunghezza e orientazione (l,q). C • Approssimazioni poligonali: Un contorno può essere approssimato da un poligono. La rappresentazione del contorno è data dai vertici dei segmenti individuati B B A A C E Fitting line segments Poligoni minimali del perimetro D B A Metodi e strutture per la gestione di basi di immagini
Codifica di contorni • Firma (signature) : rappresentazione polare r(q), ottenuta, a partire da un centro fisso, codificando il contorno con una funzione monodimensionale (es. la distanza dal centro r). Una rotazione della forma si traduce in una traslazione orizzontale del descrittore. • B-Spline.Le B-Spline sono funzioni polinomiali a tratti che forniscono buone approssimazioni locali dei contorni usando un piccolo numero di parametri. Metodi e strutture per la gestione di basi di immagini
Snakes Template Target “Snakes” è una tecnica che opera un confronto di forma tra un template rappresentato da una curva chiusa con una forma target rappresentata attraverso i bordi di una immagine. Il confronto con la forma target e quella template avviene facendo deformare la seconda sulla prima in modo da sovrapporsi il più possibile ai bordi dell’immagine. Il processo di deformazione elastica corrisponde alla minimizzazione di un funzionale di costo F in cui compaiono un termine che tiene conto dell’energia di deformazione E del template ed uno che tiene conto della sua sovrapposizione M agli edges. ( F = E-M ) Metodi e strutture per la gestione di basi di immagini
Shape globale • Correlazione dei bordi : la similarita’ tra due immagini (suddivise in blocchi) e’ calcolata come una funzione della correlazione tra i bordi. Si ammette che ogni blocco subisca un limitato shift per gestire lievi diversità tra le immagini. • Istogrammi di orientazione: è possibile rappresen-tare la struttura deibordi attraverso un istogramma delle orientazioni discrete. La descrizione del contenuto globale e’ tesa a fornire una rappresentazione delle principali strutture presenti nell’immagine per poi supportare la ricerca di immagini con struttura simile. Metodi e strutture per la gestione di basi di immagini
Tessiture Una tessitura è individuata da tre elementi: Grana: (Primitiva tonale) ne identifica gli elementi costitutivi (Texel ). Trama:(Primitiva spaziale) legge di disposizione nello spazio delle primitive locali. Risoluzione :indica l’area nella quale si evidenzia la disposizione geometrica delle primitive tonali. Texel Tessitura Trama Intuitivamente, la tessitura identifica il ripetersi di pattern con analoghe proprietà geometriche o morfologiche. La tessitura dipende dalla scala: e’ una proprietà locale e non puntuale, come il colore. Metodi e strutture per la gestione di basi di immagini
Tecniche di descrizione della tessitura • Approcci Statistici: ciascun elemento Mij di una co-occurence matrix M per una direzione d e’ dato dal numero di coppie di pixel separati da un vettore d tale che il primo ha livello di grigio i ed il secondo j. Si possono calcolare le co-o. mat. per diversi valori di d e quindi selezionare quella che massimizza una certa statistica (per esempio il contrasto) d Livello j Livello i • Approcci con filtro multi-channel: analisi delle tessiture a diversi valori di orientazione e frequenza mediante l’applicazione di filtri di Gabor • Approcci strutturali: questa classe di metodi misura la densità di primitive strutturali come linee, bordi e punti di massimo o minimo di intensità, evidenziando caratteristiche localizzate Metodi e strutture per la gestione di basi di immagini
ORIENTATION-DETECTION • Stabilire di quanti gradi deve essere ruotata un’immagine affinché si trovi nella corretta orientazione 270° Metodi e strutture per la gestione di basi di immagini
Feature locali a. b. • Estrazione delle feature a livello locale • Scomposizione dell’immagine in 10x10 blocchi • Normalizzazione delle feature Metodi e strutture per la gestione di basi di immagini
Feature di colore R L V G B U • Informazioni sulla distribuzione dei colori • Estrazione dei Color Moments dallo spazio LUV • (media e varianza per i piani L, U, V) • Feature vector composto da 3x2x100 = 600 valori Metodi e strutture per la gestione di basi di immagini
Direzione degli edge • Informazioni sulle variazioni di luminosità • Calcolo dell’istogramma delle direzioni degli edge • ( Edge Direction Histogram ) • Feature vector composto da (12+1) x 100 = 1300 valori Metodi e strutture per la gestione di basi di immagini
Corner (angoli) • Informazioni sugli oggetti presenti in un’immagine • Conteggio dei punti di corner in ogni blocco tramite • l’algoritmo Harris Corner Detector • Feature vector composto da 100 valori Metodi e strutture per la gestione di basi di immagini
Simmetria di fase • Calcolo degli istogrammi degli angoli di simmetria • ( Phase symmetry ) • Feature vector composto da 6 x 100 = 600 valori Metodi e strutture per la gestione di basi di immagini
Regola Euristica • Abbiamo implementato una semplice regola euristica, che prende in considerazione la distribuzione statistica dell’orientazione delle foto nei rullini. • Dopo aver classificato tutte le foto di un rullino, contiamo il numero di foto classificate come 0° e 180°, riassegniamo tutte le foto classificate con la classe meno rappresentata alla classe maggiormente rappresentata. Metodi e strutture per la gestione di basi di immagini
RISULTATI Metodi e strutture per la gestione di basi di immagini
Classificazione di Immagini • Con classificazione di immagini, ci riferiamo al problema di assegnare una data immagine a una delle possibili classi. • Tenendo conto che normalmente le immagini, in particolare quelle contenute in pagine web, sono circondate da testo che ne descrivono il contenuto, lo scopo è utilizzare sia informazioni testuali che visuali per aumentare le performance di classificazione. Metodi e strutture per la gestione di basi di immagini
Feature Extraction • Come features testuali è stato usato l’approccio “bag-of-words”. Ogni documento, il quale consiste in un’insieme di parole adiacenti a un’immagine, viene rappresentato come un vettore dove ogni elemento indica la presenza o l’assenza di una determinata parola nel documento (istogramma). • Come features visuali, abbiamo usato il colore e le texture. Ogni immagine è divisa in 4*4 blocchi e in ognuno di questi sono calcolate le features di colore e di texture. Metodi e strutture per la gestione di basi di immagini
SISTEMA PROPOSTO Input pattern height: 6-10 weight: 235 lbs position: forward born: october 17, 1966, baltimore, md college: duke Visual features Textual features height: 6-10 weight: 235 lbs position: forward born: october 17, 1966, baltimore, md college: duke Color (CF) Texture(GF) Text (TF) AdaBoost Ccf + Cgf + Ctf AdaBoost Ctf • Due classificatori AdaBoost sono addestrati usando le differenti features: il primo viene addestrato concatenando xcf, xgf e xtf mentre il secondo viene addetrato usando solo le feature testuali. • La classificazione di un nuovo pattern (image + text) inizia con un’estrazione di feature analoga. La classificazione avviene combinando, usando la semplice regola della media, i risultati dei due classificatori. Metodi e strutture per la gestione di basi di immagini
Risultati • Classificatori: Nearest Neighbor (NN), Radial basis function-Support Vector Machine (R) and AdaBoost (A) • Feature sets: Texture (GF), Color (CF), Textual (TF) e la concatenazione dei tre feature sets (C). Metodi e strutture per la gestione di basi di immagini
Outline • Riconoscimento di persone e biometria • Sistemi biometrici: una definizione • Prestazioni di un sistema biometrico • Panoramica sulle caratteristiche biometriche • Tecnologie biometriche • Applicazioni • Prospettive future Metodi e strutture per la gestione di basi di immagini
Riconoscimento biometrico Con il termine “riconoscimento biometrico” si fa riferimento all’uso di caratteristiche fisiologiche o comportamentali distintive per il riconoscimento automatico di individui. • fisiologiche • impronta, mano, iride, retina, volto, dna,... • comportamentali • firma, voce, stile di battitura, ... Nota: probabilmente tutte le caratteristiche biometriche sono in realtà una combinazione di caratteristiche fisiologiche e comportamentali e non dovrebbero essere classificate in maniera esclusiva come appartenenti a una delle due categorie. Metodi e strutture per la gestione di basi di immagini
Modalità di riconoscimento:Verifica vs. Identificazione (1) Caricamento della faccia di riferimento 1 sì b r 2 l c a m 4 match? no Localizzazione del volto Acquisizione faccia corrente 3 • Verifica (Autenticazione): Sono chi dichiaro di essere? • Confronto uno a uno al fine di determinare se l’identità dichiarata dall’utente è vera o no Metodi e strutture per la gestione di basi di immagini
Verifica vs Identificazione (2) sì 1 Localizzazione del volto identificato? Acquisizione faccia corrente b r 2 l 3 c a no 4 m ricerca DB La più simile • Identificazione: Chi sono? • Confronto uno a molti al fine di stabilire l’identità dell’individuo Face DB Metodi e strutture per la gestione di basi di immagini
Modalità di riconoscimento:positivo vs. negativo • Riconoscimento negativo: • Il sistema stabilisce se la persona è chi nega di essere • Lo scopo è quello di evitare che una singola persona utilizzi più identità • Sola modalità identificazione Servizi sociali, applicazioni forensi Il riconoscimento negativo può essere effettuato solo attraverso un sistema biometrico • Riconoscimento positivo: • Il sistema stabilisce se la persona è chi dichiara di essere • Lo scopo è quello di impedire che più persone utilizzino la stessa identità • Modalità verifica o identificazione Controllo accessi, login su computer, commercio elettronico, ... Metodi e strutture per la gestione di basi di immagini
Classificazione delle applicazioni biometriche • Cooperative vs. non cooperative • Qual è il comportamento degli impostori nell’interazione con il sistema? • Evidenti vs. nascoste • L’utente è a conoscenza di essere sottoposto a riconoscimento biometrico? • Abituali vs. non abituali • Quanto spesso l’utente registrato è soggetto a riconoscimento biometrico? • Supervisionate vs. non supervisionate • Il processo di acquisizione di dati biometrici viene controllato, guidato o supervisionato da un operatore? Metodi e strutture per la gestione di basi di immagini
Architettura di un sistema biometrico Enrollment Biometrictemplate Computer Featureextractor Templatestorage Sensor Biometriccharacteristic Qualitychecker A/D Verification Biometrictemplate Computer Featureextractor Matcher(1 match) Templatestorage Sensor Biometriccharacteristic A/D True / False Claimedidentity Identification N biometrictemplates Computer Featureextractor Matcher(N matches) Templatestorage Sensor Biometriccharacteristic A/D User’s identity or“user not identified” Metodi e strutture per la gestione di basi di immagini
Verifica di impronte Enrollment Verifica Lettore card acquisizione impronta acquisizione impronta lettura badge estrazione feature estrazione feature modello creazione e memorizzazione del modello matching Sì No Metodi e strutture per la gestione di basi di immagini
Template • Definizione • Dati caratteristici e codificati ottenuti dalle feature uniche di un dato biometrico • Un elemento fondamentale di un sistema biometrico • Per il matching vengono utilizzati i template, non gli esempi • Quantità di dati inferiore rispetto agli esempi (es. 1/100, 1/1000) • Un template “non dovrebbe permettere di ricostruire” un esempio valido • La dimensione favorisce la cifratura e la memorizzazione su più supporti • Template diversi vengono generati ogni volta che un individuo fornisce un esempio biometrico Metodi e strutture per la gestione di basi di immagini
Errori nei sistemi biometrici Impostor distribution p(s|H0=true) p Genuine distribution p(s|H1=true) FMR(t) FNMR(t) Threshold (t) error ZeroFMR ZeroFNMR FMR P(D1|H0=true) FNMRP(D0|H1=true) EER Matching score (s) Threshold (t) • False Match (nel riconoscimento positivo chiamato spesso False Acceptance) • misurazioni biometriche di persone diverse vengono erroneamente considerate come appartenenti alla stessa persona • False Non-Match(nel riconoscimento positivo chiamato spesso False Rejection) • misurazioni biometriche della stessa persona vengono erroneamente attribuite a persone diverse Ipotesi: H0: persona diversa H1: stessa persona Decisioni possibili: D0: persone diverse D1: stessa persona Metodi e strutture per la gestione di basi di immagini
Macro- e micro-caratteristichedelle impronte Un’impronta è composta da un insieme di linee (ridge line), che scorrono principalmente parallele, creando un pattern (ridge pattern) terminazione biforcazione Talvolta le ridge line producono macro-singolarità locali, chiamate whorl(O), loop(U) e delta (D) ridge line loop whorl delta core Il punto più a nord della ridge line più interna Le minuzie, o caratteristiche di Galton, vengono determinate a partire dalle terminazioni o biforcazioni delle ridge line Metodi e strutture per la gestione di basi di immagini
Micro-caratteristiche: minuzie Le minuzie, o feature di Galton (1892), consistono in discontinuità delle ridge line. Terminazione Biforcazione Lake Il modello di coordinate basato su minuzie dell’FBI considera solo terminazioni e biforcazioni. Independent ridge Point or island biforcazione terminazione Spur Crossover I tipi di minuzie più comuni Metodi e strutture per la gestione di basi di immagini
Iride Iride: la corona di tessuto colorato che circonda la pupilla dell’occhio. • Vantaggi • Estremamente discriminante • Stabile e invariante durante tutto il corso della vita • Svantaggi • Richiede un rigido controllo ambientale • Tecnica abbastanza invasiva • Costi medio/alti (telecamere a elevata precisione) • L’acquisizione dell’iride richiede una forte collaborazione da parte del soggetto • Adatta per applicazioni che richiedono un elevato grado di sicurezza Metodi e strutture per la gestione di basi di immagini
Prestazioni e limitazioni deisistemi basati sull’iride • Prove svolte sul campo hanno mostrato che la percentuale di false accettazioni per i sistemi di riconoscimento dell’iride è molto bassa • La lunghezza costante e l’invarianza rispetto alla posizione permettono un confronto molto veloce • L’acquisizione dell’immagine dell’iride richiede la collaborazione dell’utente che deve posizionarsi davanti alla telecamera, a una distanza e in una posa prefissata; possono sorgere problemi di acquisizione • Difficile da applicare in presenza di palpebre abbassate, persone affette da forte miopia, presenza di lenti a contatto • Il costo dei sistemi di riconoscimento basati su iride è relativamente alto Metodi e strutture per la gestione di basi di immagini
Firma • Vantaggi • User friendly • Già accettata e utilizzata in molte transazioni amministrative, legali e commerciali • Svantaggi • Cambia con il passare del tempo • È influenzata dalle condizioni fisiche ed emotive del soggetto • La firma di alcune persone è molto variabile (anche due esempi consecutivi) • I falsari di professione possono riprodurre la firma e ingannare il sistema Sono possibili approcci statici (geometria della firma) e dinamici (accelerazione, velocità, traiettoria, pressione, …). Vengono utilizzati particolari sensori, ad es. tavolette grafiche per gli approcci dinamici o scanner b/n per l’analisi statica della firma Metodi e strutture per la gestione di basi di immagini
Sistemi biometrici multimodali • Limitazioni all’uso di una singola caratteristica biometrica: • Percentuale di impossibilità di acquisizione (~4% per l’impronta) • Rumore nelle immagini acquisite (uso continuativo del sensore) • Mancanza di persistenza (voce alterata a causa del freddo) • Potere discriminante limitato (rapporto FAR/FRR elevato) • Più facile da raggirare (falsificazione del volto) • I sistemi biometrici multimodali: • Aumentano le prestazioni • Riducono la percentuale di impossibilità di acquisizione • Più robusti ai tentativi di frode Metodi e strutture per la gestione di basi di immagini
Progettazione di sistemi multibiometrici • Scelta del numero di indicatori biometrici • Livello di fusione: rappresentazione, matching score, decisione • Apprendimento di pesi delle caratteristiche biometriche • individuali per ciascun utente • Trade-off costi / prestazioni • EigenFaces • Distanza euclidea • Minuzie • String Matching • Lunghezza/larghezza • Distanza euclidea Metodi e strutture per la gestione di basi di immagini
Approcci multibiometrici • L’uso di sistemi multipli (es. impronte di più dita o più acquisizioni) reintroduce il problema dell’impossibilità di acquisizione; l'uso di più caratteristiche biometriche rappresenta un'alternativa migliore Metodi e strutture per la gestione di basi di immagini
Signature On-Line • Con sistema di verificazione basato su “signature on-line”, si intende un metodo che tiene conto delle funzioni che descrivono la dinamica delle firme (es., la traiettoria, la variazione della pressione) • Diversi approcci sono stai proposti in letteratura per estrarre informazioni rilevanti a partire da firme on-line; questi metodi possono essere divisi in due categorie: • Approcci feature-based, in cui vengono estratte informazioni globali (es. Il tempo totale, il numero di volte in cui la pressione si azzera …) • ii) Approcci function-based, in cui vengono descritte proprietà locali (Es., velocità media in un dato intervallo di tempo, • accelerazione in un dato intervallo di tempo …) Metodi e strutture per la gestione di basi di immagini