Endgame Logistics
Endgame Logistics. Final Project Presentations Tuesday, March 19, 3-5, KEC2057 Powerpoint suggested (email to me before class) Can use your own laptop if necessary (e.g. demo) 10 minutes of presentation per project Not including questions Final Project Reports

Endgame Logistics
E N D
Presentation Transcript
Endgame Logistics • Final Project Presentations • Tuesday, March 19, 3-5, KEC2057 • Powerpoint suggested (email to me before class) • Can use your own laptop if necessary (e.g. demo) • 10 minutes of presentation per project • Not including questions • Final Project Reports • Due: Friday, March 22, 12 noon
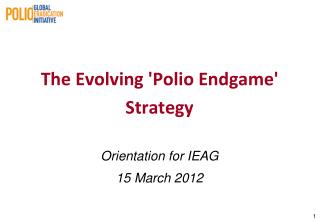
known world model vs. unknown Percepts numeric vs. discrete sole sourceof change vs. other sources Actions World perfect vs. noisy deterministic vs. stochastic ???? fully observable vs. partially observable instantaneous vs. durative Objective concurrent actions vs. single action goal satisfaction vs. general reward
known world model vs. unknown vs. partial model STRIPS Planning Percepts numeric vs. discrete sole sourceof change vs. other sources Actions World perfect vs. noisy deterministic vs. stochastic ???? fully observable vs. partially observable instantaneous vs. durative Objective concurrent actions (but …) vs. single action goal satisfaction vs. general reward
known world model vs. unknown MDP Planning Percepts numeric vs. discrete sole sourceof change vs. other sources Actions World perfect vs. noisy deterministic vs. stochastic ???? fully observable vs. partially observable instantaneous vs. durative Objective concurrent actions vs. single action goal satisfaction vs. general reward
known world model vs. unknown ReinforcementLearning Percepts numeric vs. discrete sole sourceof change vs. other sources Actions World perfect vs. noisy deterministic vs. stochastic ???? fully observable vs. partially observable instantaneous vs. durative Objective concurrent actions vs. single action goal satisfaction vs. general reward
known world model vs. unknown vs. simulator Simulation-BasedPlanning Percepts numeric vs. discrete sole sourceof change vs. other sources Actions World perfect vs. noisy deterministic vs. stochastic ???? fully observable vs. partially observable instantaneous vs. durative Objective concurrent actions vs. single action goal satisfaction vs. general reward
known world model vs. unknown Percepts numeric vs. discrete sole sourceof change vs. other sources Actions World perfect vs. noisy deterministic vs. stochastic ???? fully observable vs. partially observable instantaneous vs. durative Objective concurrent actions vs. single action goal satisfaction vs. general reward
Numeric States • In many cases states are naturally described in terms of numeric quantities • Classical control theory typically studies MDPs with real-valued continuous state spaces • Typically assume linear dynamical systems • Quite limited for most applications we are interested in in AI (often mix of discrete and numeric) • Typically we deal with this via feature encodings of the state space • Simulation based methods are agnostic about whether the state is numeric or discrete
known world model vs. unknown Percepts numeric vs. discrete sole sourceof change vs. other sources Actions World perfect vs. noisy deterministic vs. stochastic ???? fully observable vs. partially observable instantaneous vs. durative Objective concurrent actions vs. single action goal satisfaction vs. general reward
Partial Observability • In reality we only observe percepts of the world not the actual state • Partially-Observable MDPs (POMDPs) extend MDPs to handle partial observability • Start with an MDP and add an observation distributionP(o | s) : probability of observation o given state s • We see a sequence of observations rather than sequence of states • POMDP planning is much harder than MDP planning. Scalability is poor. • Can often apply RL in practice using features of observations
known world model vs. unknown Percepts numeric vs. discrete sole sourceof change vs. other sources Actions World perfect vs. noisy deterministic vs. stochastic ???? fully observable vs. partially observable instantaneous vs. durative Objective concurrent actions vs. single action goal satisfaction vs. general reward
Other Sources of Change • In many cases the environment changes even if no actions are select by the agent • Sometimes due to exogenous events, e.g. 911 calls come in at random • Sometimes due to other agents • Adversarial agents try to decrease our reward • Cooperative agents may be trying to increase our reward or have their own objectives • Decision making in the context of other agents is studied in the area of game theory
known world model vs. unknown Percepts numeric vs. discrete sole sourceof change vs. other sources Actions World perfect vs. noisy deterministic vs. stochastic ???? fully observable vs. partially observable instantaneous vs. durative Objective concurrent actions vs. single action goal satisfaction vs. general reward
Durative Actions • Generally different actions have different durations • Often durations are stochastic • Semi-Markov MDPs (SMDPs) are an extension to MDPs that account for actions with probabilistic durations • Transition distribution changes to P(s’,t | s, a)which gives the probability of ending up in state s’ in t time steps after taking action a in state s • Planning and learning algorithms are very similar to standard MDPs. The equations are just a bit more complex to account for time.
known world model vs. unknown Percepts numeric vs. discrete sole sourceof change vs. other sources Actions World perfect vs. noisy deterministic vs. stochastic ???? fully observable vs. partially observable instantaneous vs. durative Objective concurrent actions vs. single action goal satisfaction vs. general reward
Durative Actions • Generally different actions have different durations • Often durations are stochastic • Semi-Markov MDPs (SMDPs) are an extension to MDPs that account for actions with probabilistic durations • Transition distribution changes to P(s’,t | s, a)which gives the probability of ending up in state s’ in t time steps after taking action a in state s • Planning and learning algorithms are very similar to standard MDPs. The equations are just a bit more complex to account for time.
known world model vs. unknown Percepts numeric vs. discrete sole sourceof change vs. other sources Actions World perfect vs. noisy deterministic vs. stochastic ???? fully observable vs. partially observable instantaneous vs. durative Objective concurrent actions vs. single action goal satisfaction vs. general reward
Concurrent Durative Actions • In many problems we need to form plans that direct the actions of a team of agents • Typically requires planning over the space of concurrent activities, where the different activities can have different durations • Can treat these problems as a huge MDP (SMDP) where the action space is the cross-product of the individual agent actions • Standard MDP algorithms will break • There are multi-agent or concurrent-action extensions to most of the formalisms we studied in class
known world model vs. unknown Percepts numeric vs. discrete sole sourceof change vs. other sources Actions World perfect vs. noisy deterministic vs. stochastic ???? fully observable vs. partially observable instantaneous vs. durative Objective concurrent actions vs. single action goal satisfaction vs. general reward
known world model vs. unknown Percepts numeric vs. discrete sole sourceof change vs. other sources Actions World perfect vs. noisy deterministic vs. stochastic ???? fully observable vs. partially observable instantaneous vs. durative Objective concurrent actions vs. single action goal satisfaction vs. general reward
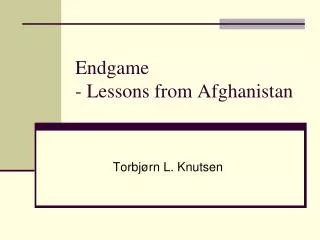
known world model vs. unknown AI Planning sole sourceof change vs. other sources Actions Percepts World perfect vs. noisy deterministic vs. stochastic fully observable vs. partially observable ???? instantaneous vs. durative Objective concurrent actions vs. single action goal satisfaction vs. general reward
known world model vs. unknown Percepts sole sourceof change vs. other sources Actions World perfect vs. noisy deterministic vs. stochastic fully observable vs. partially observable ???? instantaneous vs. durative Objective concurrent actions vs. single action goal satisfaction vs. general reward
known world model vs. unknown AI Planning sole sourceof change vs. other sources Actions Percepts World perfect vs. noisy deterministic vs. stochastic fully observable vs. partially observable ???? instantaneous vs. durative Objective concurrent actions vs. single action goal satisfaction vs. general reward
known world model vs. unknown AI Planning sole sourceof change vs. other sources Actions Percepts World perfect vs. noisy deterministic vs. stochastic fully observable vs. partially observable ???? instantaneous vs. durative Objective concurrent actions vs. single action goal satisfaction vs. general reward