Surface Reconstruction from Unorganized Points
Outline. IntroductionAlgorithm OverviewResultsDiscussion. Problem Statement. Inputan unorganized set of points assumed to lie on or near an unknown manifold MOutput a simplicial surface that approximates M. Features. a robust solution to the unifying general surface reconstruction prob

Surface Reconstruction from Unorganized Points
E N D
Presentation Transcript
1. Surface Reconstruction from Unorganized Points Hugues Hoppe et. al
SIGGRAPH�92
Min Chen
Qingdi Liu
2. Outline
Introduction
Algorithm Overview
Results
Discussion
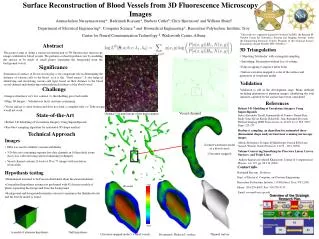
3. Problem Statement Input
an unorganized set of points assumed to lie on or near an unknown manifold M
Output
a simplicial surface that approximates M
4. Features
a robust solution to the unifying general surface reconstruction problem
with relatively few assumptions about the set of points X and underlying surface U
5. Algorithm Overview Two main sampling assumptions
X is a ?-dense, ?-noise sample of U
Features of U that are too small are not recoverable
An approximation of ?+? is a user-specified parameter for our program
6. Stage 1: Define Signed Distance Function Tangent Plane Estimation
each data point x --> an oriented tangent plane ( oi, ni )
center oi --> centroid of Nbhd( xi)
normal ni --> principal component analysis( SVD ) on covariance matrix of Nbhd(xi)
7. Consistent Tangent Plane Orientation Set up Riemannian Graph
G = ( O, E )
cost W( i, j ) = 1 - | Ni ? Nj |
Traversing an Euclidean Minimum Spanning Tree of G
8. Signed Distance Function f f(p) = disti(p) = ( p - oi )?ni
Undefined distance value for boundary identification.
Zero set Z(f) is our estimate for M
9. Stage 2: Contour Tracing Variation of marching cube algorithm( Geoff Wyvill, 1986 )
use hash tables to avoid repeated calculation
from seed cube to visit only appropriate cubes
Deal with cubes with undefined distance
Degenerate zero case -- perturbing to a small positive value
10. Results
15. Problem with disconnected surface
For surfaces with real holes close by, it tries to connect them.